เริ่มต้นใช้งาน EtherCAT Servo Drive WECON VD5L กับ PLC A500
Last updated: 11 พ.ค. 2569 | 131 จำนวนผู้เข้าชม |

เริ่มต้นใช้งาน EtherCAT Motion Control กับ Servo Drive WECON VD5L และ PLC A500 Series
สำหรับบทความนี้เราจะมาแนะนำการเริ่มต้นเขียนโปรแกรมและควบคุมสั่งงาน Servo Drive EtherCAT จากแบรนด์ WECON โดย ณ ปัจจุบันจะมี 2 รุ่นด้วยกันคือ VD3E รุ่น Top Performance และ รุ่น VD5L รุ่นราคาประหยัด
ซึ่งในบทความนี้เราจะทดสอบด้วย VD5L Series โดยจะใช้ PLC A500 Series ใหม่ล่าสุดของแบรนด์ WECON ในการควบคุมสั่งงาน ซึ่งผู้ที่สนใจสามารถอ้างอิงและเรียนรู้ได้จากบทความนี้ ซึ่งไม่ว่าจะใช้รุ่นไหนของ WECON จะมีพื้นฐานเริ่มต้นเหมือนกัน
**โดยในท้ายบทความเราจะทิ้งลิ้งสำหรับดาวน์โหลด Demo Project file ทั้ง PLC และ HMI ที่นำมาทดสอบนี้ไว้ให้ท่านที่สนใจโหลดไปศึกษาและดูตัวอย่างเป็นแนวทาง
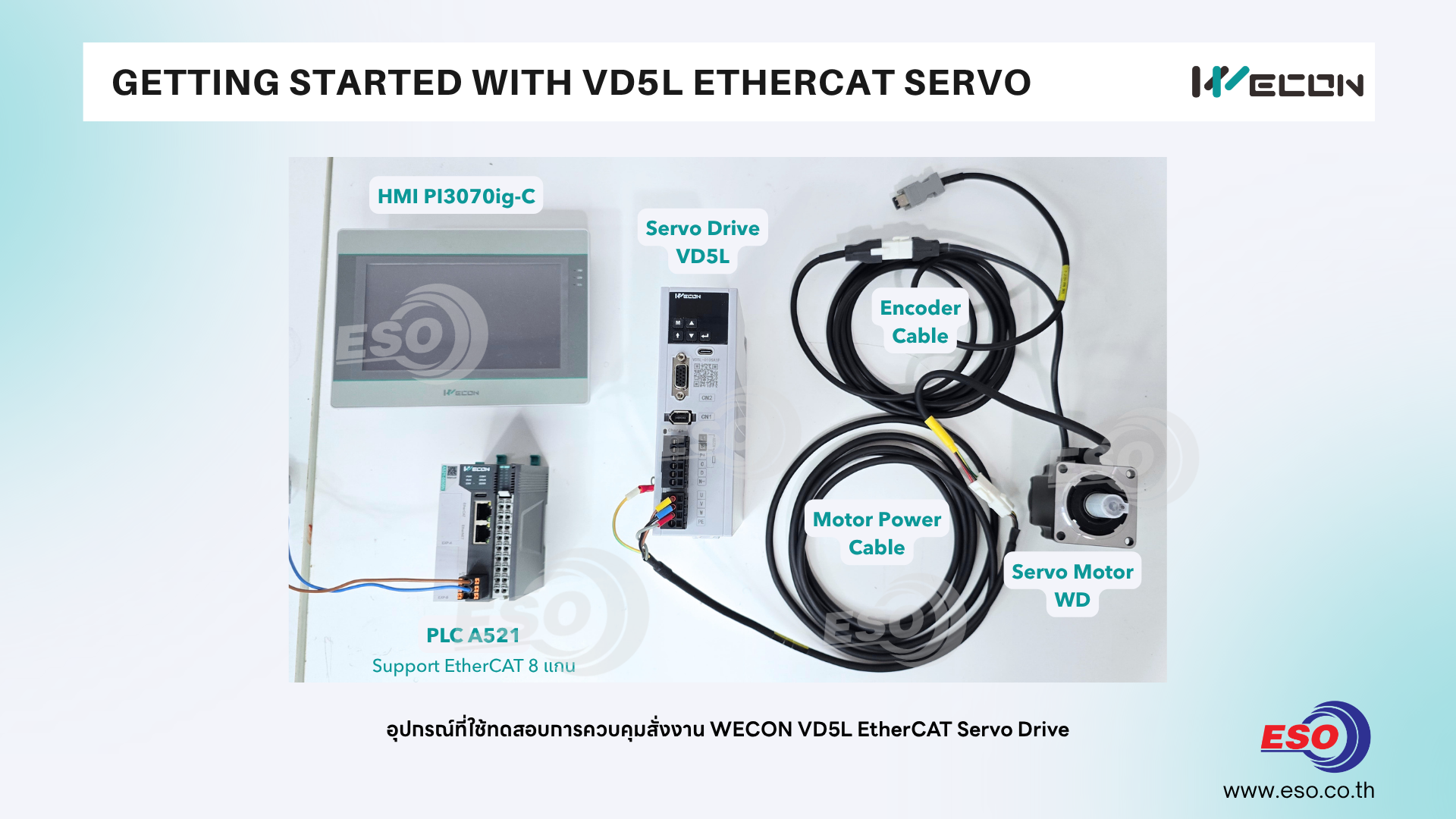
ในบทความนี้เราจะมีอุปกรณ์ทดสอบดังนี้
1. PC / Computer ติดตั้ง PLC Editor 2 และ PI Studio V10
2. HMI WECON 3070ig-C Series จอทัชสกรีนควบคุมขนาด 7 นิ้ว
3. PLC A521-0808N-D สำหรับทดสอบ รองรับการควบคุม EtherCAT Servo 8 แกน
4. EtherCAT Servo Drive VD5L-010SA1P(10A,220V,EtherCAT)
5. Servo motor WD60M-02030S-A1F(0.2kw,220V)
6. สายสัญญาณ Encoder Cable
7. สายไฟจ่าย Servo Motor
ท่านสามารถดาวน์โหลดซอฟท์แวร์ PLC Editor 2 ได้ที่ลิ้งด้านล่างนี้
https://docs.we-con.com.cn/bin/view/LX6/Download/02%20Software/
ท่านสามารถดาวน์โหลดซอฟท์แวร์ PLC Editor 2 ได้ที่ลิ้งด้านล่างนี้
https://docs.we-con.com.cn/bin/view/PIStudio/Download/3%20Software/
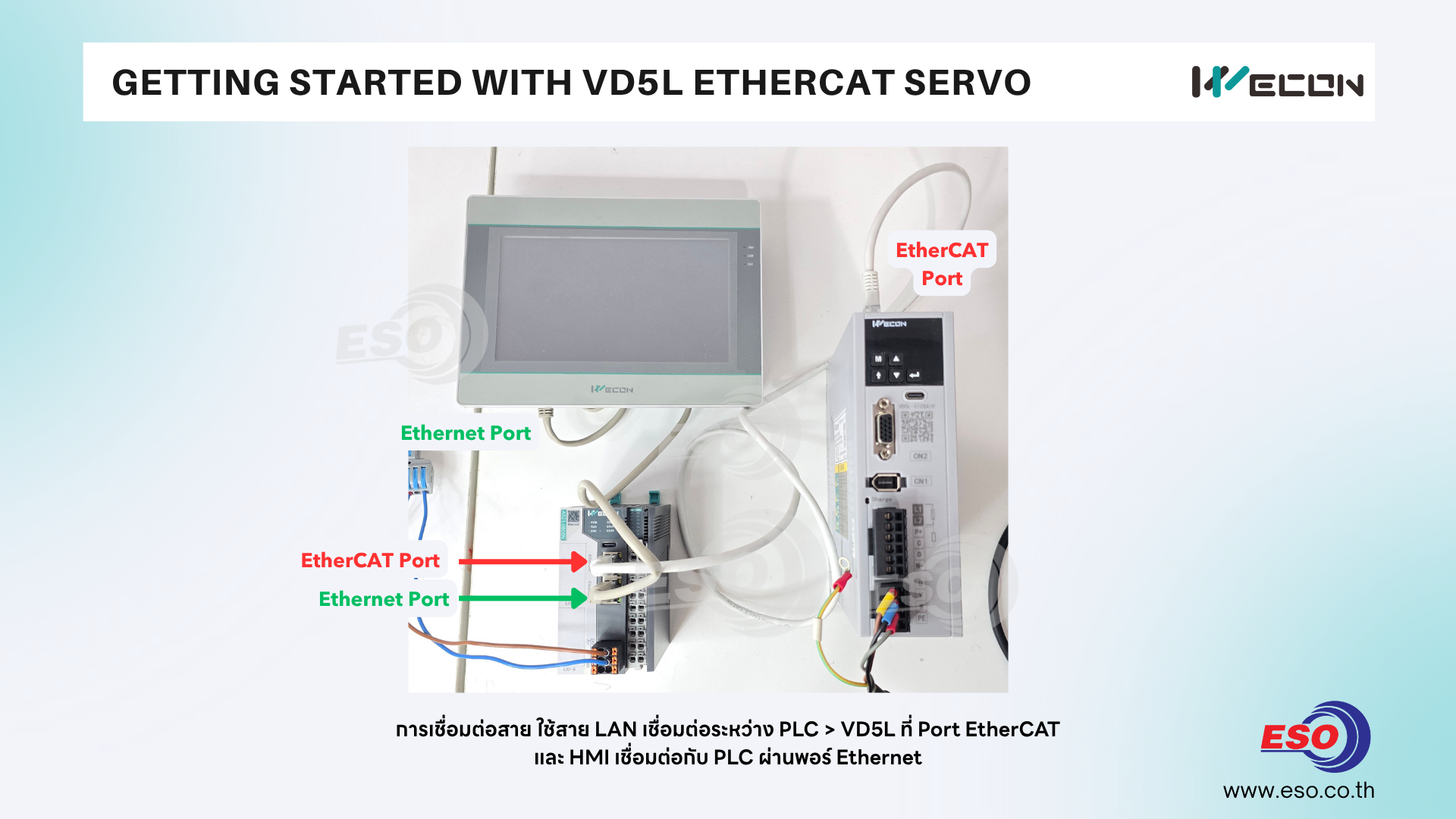
การเชื่อมต่อสายสัญญาณ
การเชื่อมต่อสายจะใช้สาย LAN เชื่อมต่อระหว่าง PLC A521 กับ Servo Drive VD5L ที่ Port EtherCAT
และ HMI PI3070ig-C เชื่อมต่อกับ PLC A521 ผ่านพอร์ท Ethernet
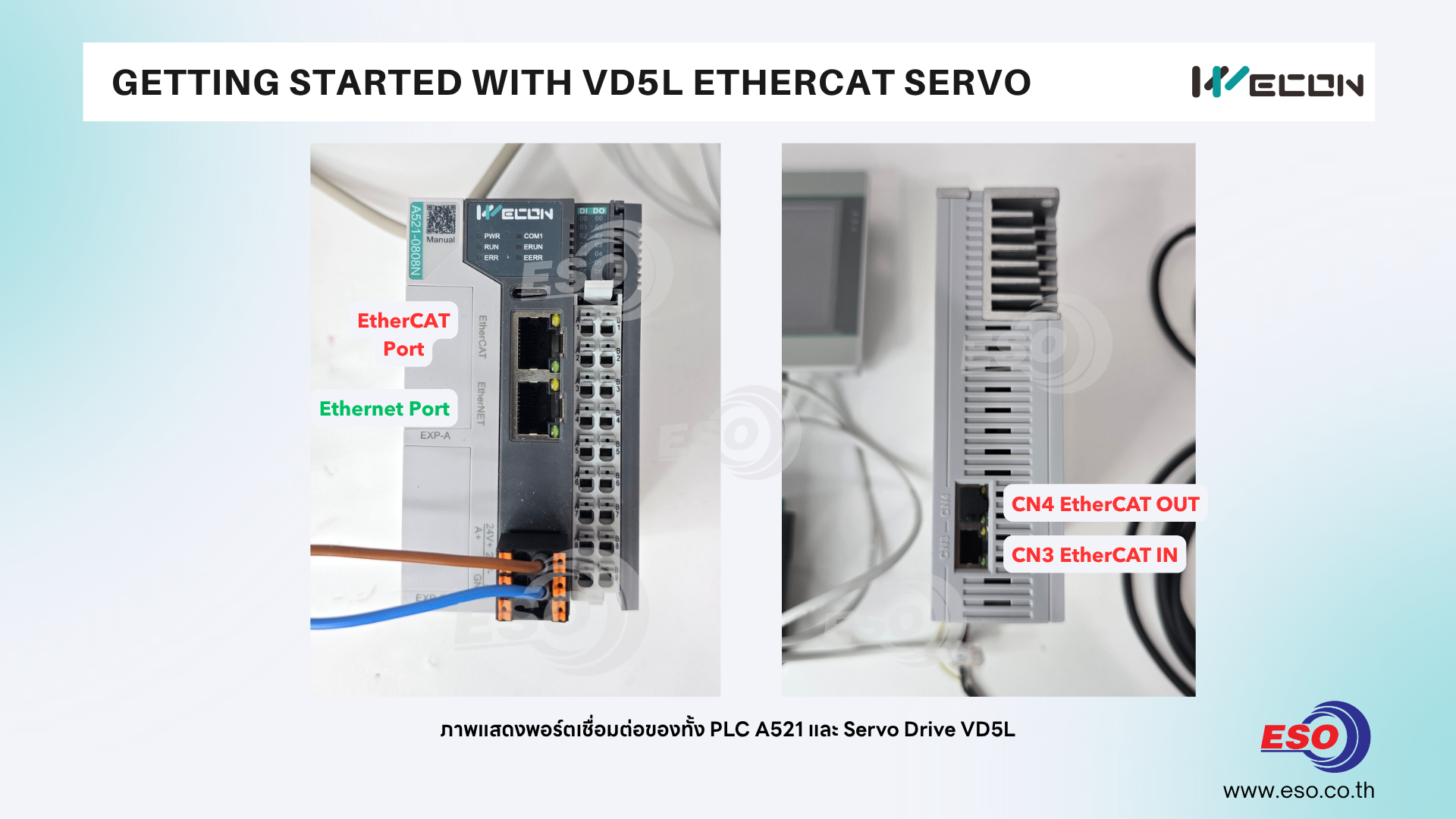
ภาพแสดงพอร์ทเชื่อมต่อ Ethernet และ EtherCAT ที่อุปกรณ์ ผู้ใช้งานควรตรวจสอบให้ดีเพราะจะชอบต่อสายสลับกันที่พอร์ต EtherCAT ทำให้ไม่สามารถควบคุมสั่งงานได้

เชื่อมต่อสาย Encoder เข้ากับพอร์ต CN1 ที่ตัว Servo Drive
และต่อเทอมินอลสาย Power motor เข้ากับ Drive
และจะต้องต่อแหล่งจ่ายไฟให้กับ Drive ด้วย โดยรุ่นที่ใช้งานนั้นเป็น Servo Drive ชนิด Single Phase 220VAC เราจะต่อ L - N เข้าที่เทอมินอล L1-L2
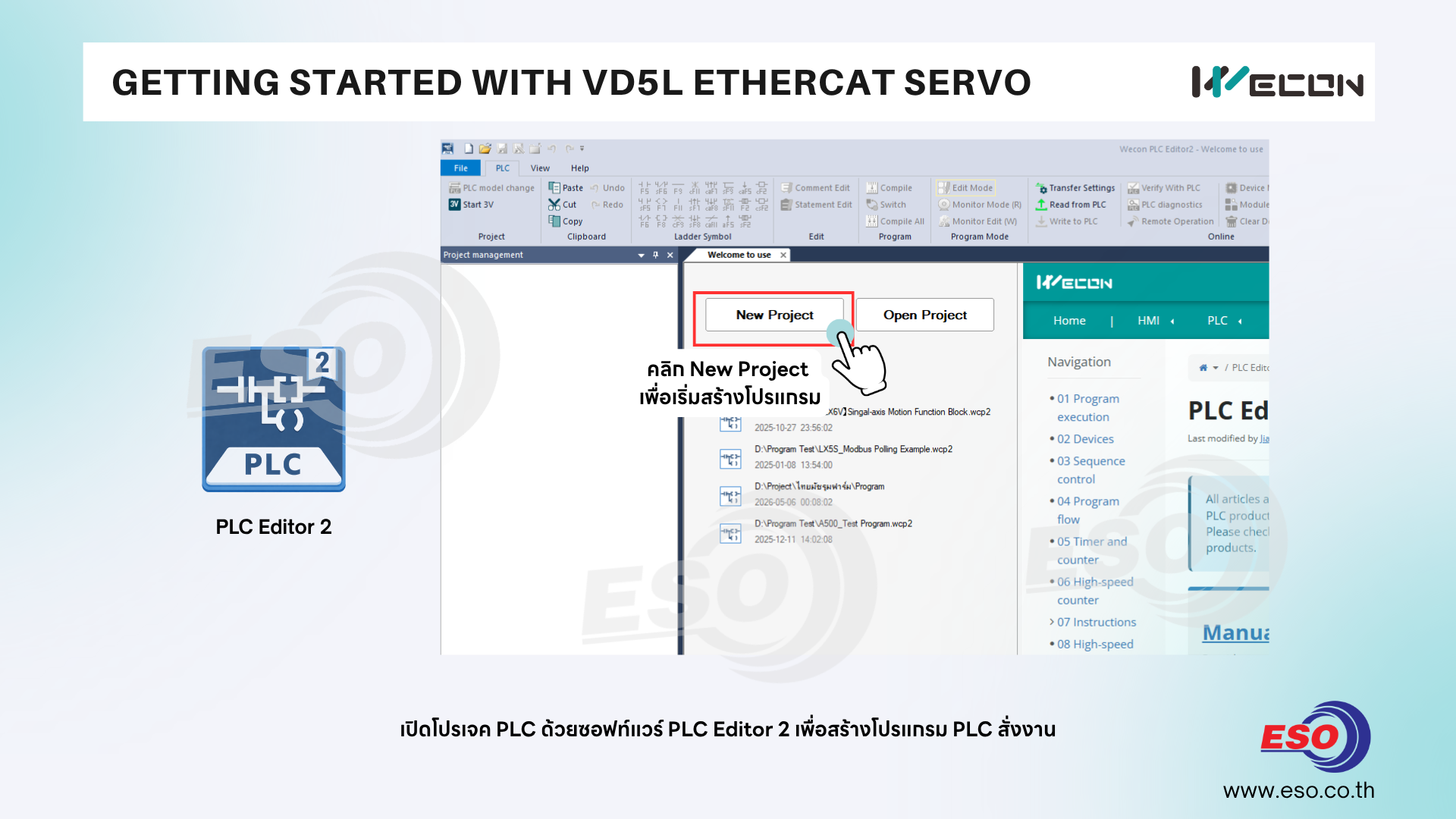
1.เปิดโปรเจค PLC ด้วยซอฟท์แวร์ PLC Editor 2 เพื่อสร้างโปรแกรม PLC สั่งงาน กด New Project เพื่อสร้างโปรเจคไฟล์
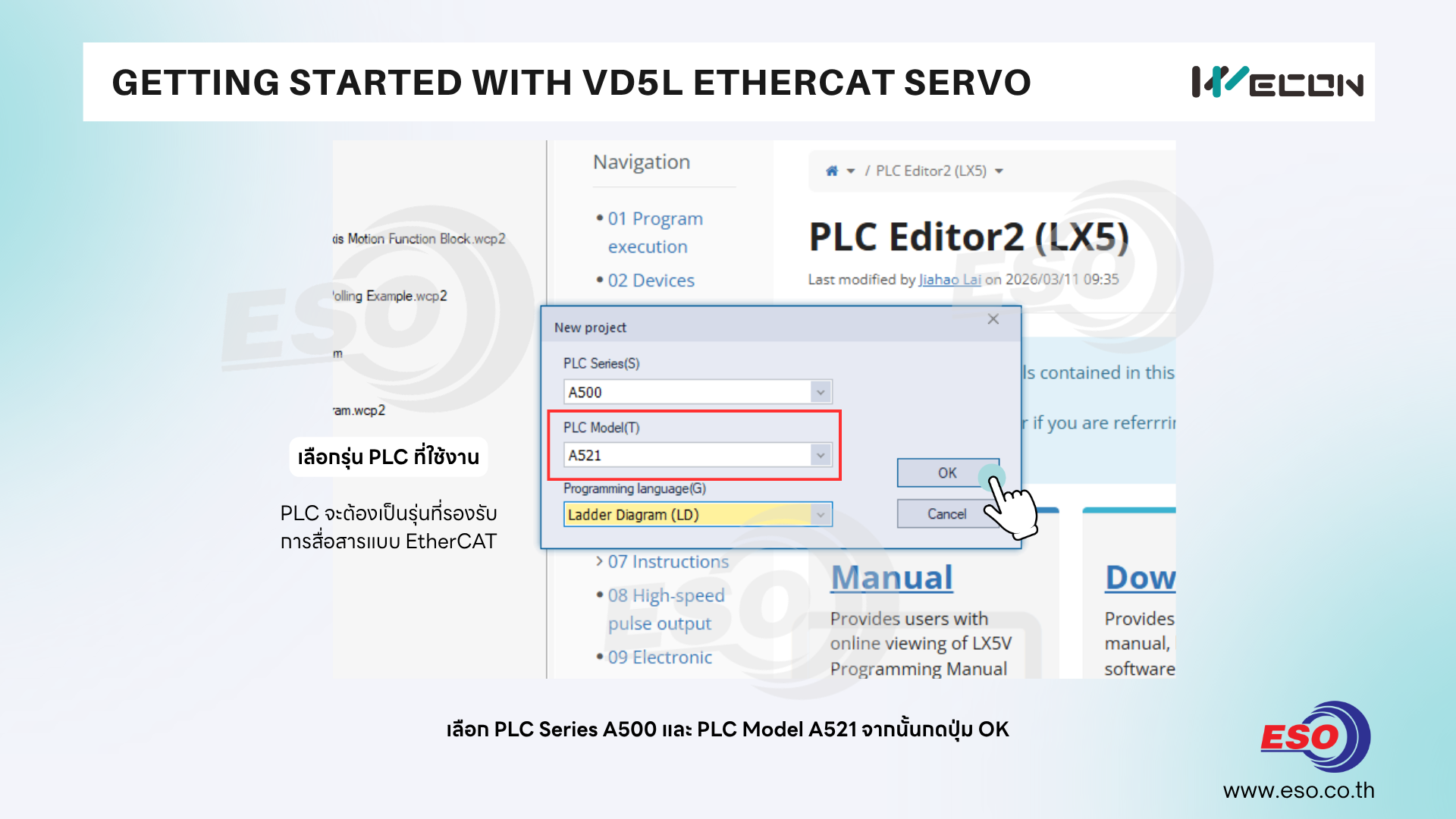
2. ให้คลิกเลือก PLC Series A500 > PLC Model A521 จากนั้นกดปุ่ม OK เพื่อสร้างโปรเจค
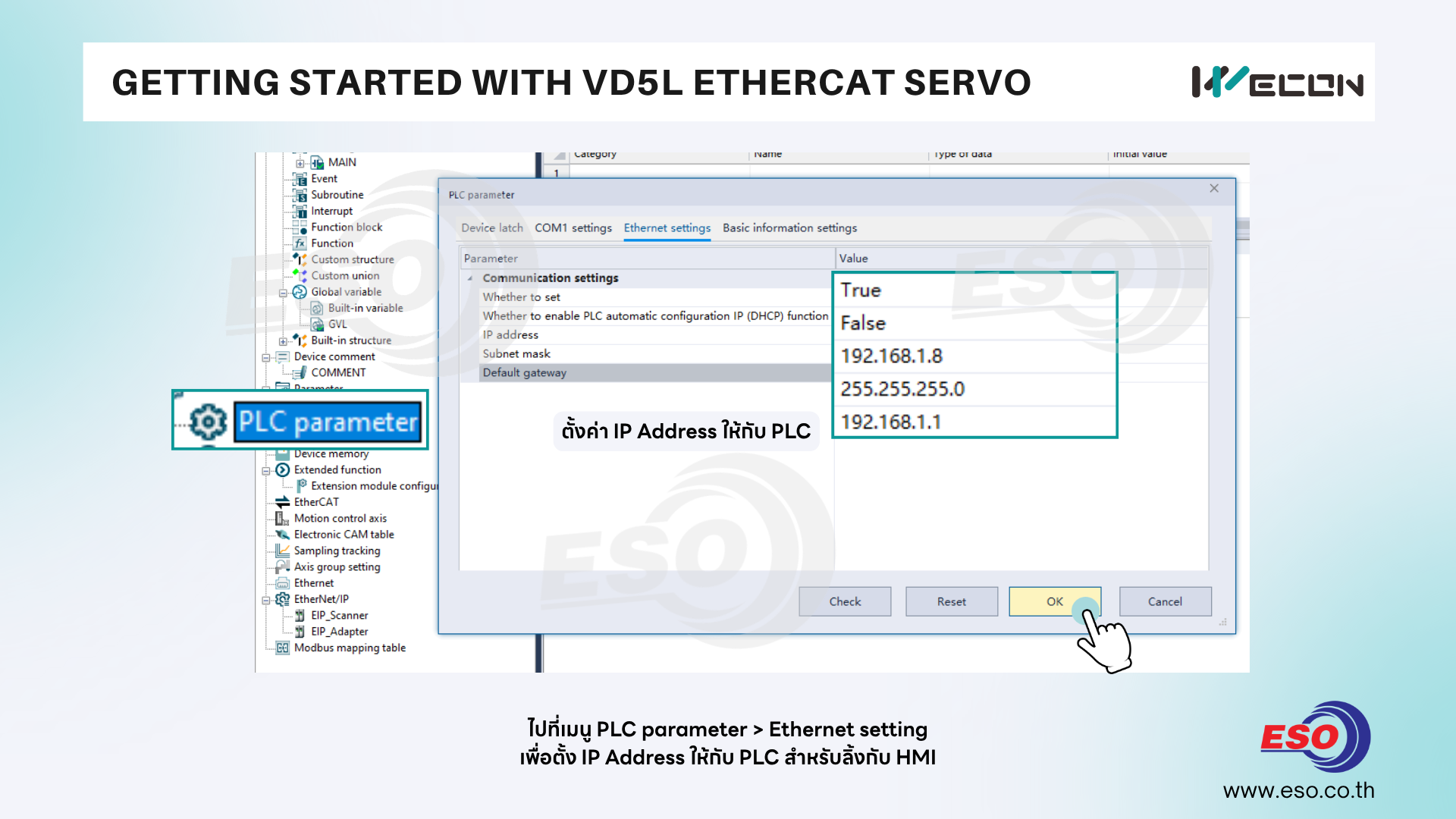
3. ไปที่เมนู PLC parameter > Ethernet setting เพื่อตั้ง IP Address ให้กับ PLC สำหรับลิ้งกับ HMI
ในที่นี้ตั้งค่า PLC = 192.168.1.8
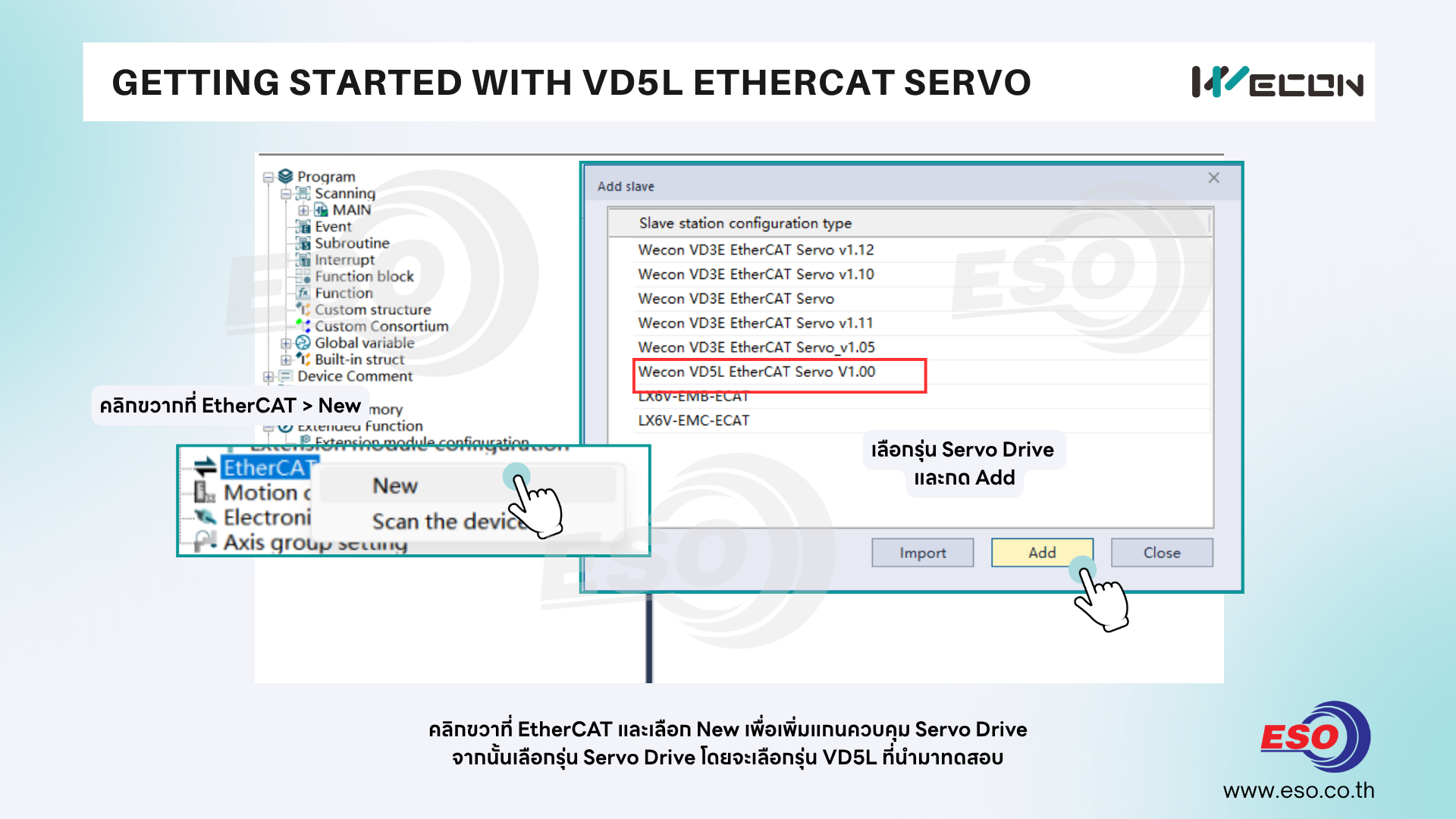
4. คลิกขวาที่เมนู EtherCAT และเลือก New เพื่อเพิ่มแกนควบคุม Servo Drive
จากนั้นเลือกรุ่น Servo Drive โดยจะเลือกรุ่น VD5L EtherCAT Servo ที่นำมาทดสอบสั่งงาน
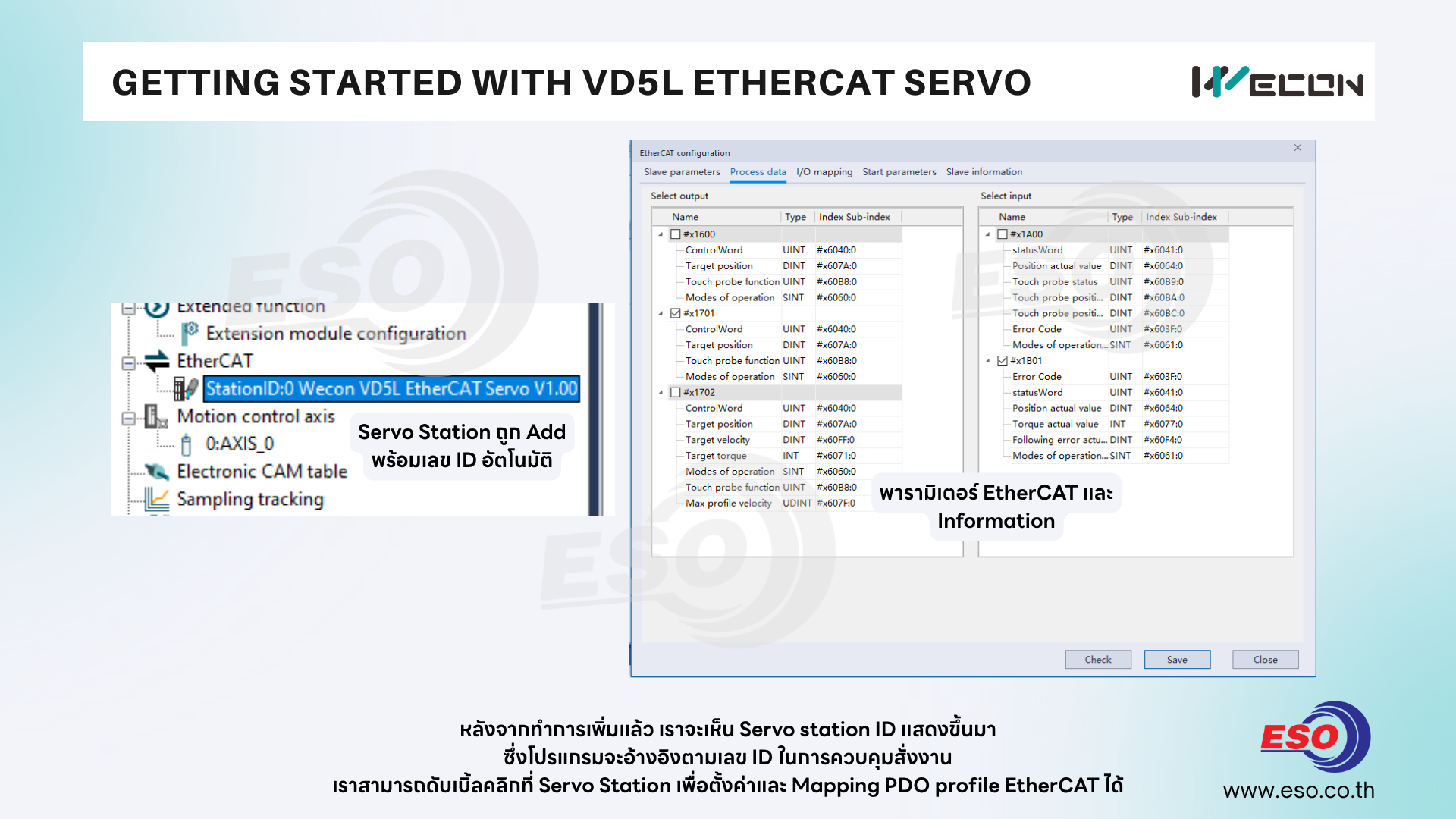
5. หลังจากทำการเพิ่มแล้ว เราจะเห็น Servo station ID แสดงขึ้นมา
ซึ่งโปรแกรมจะอ้างอิงตามเลข ID ในการควบคุมสั่งงาน
เราสามารถดับเบิ้ลคลิกที่ Servo Station เพื่อตั้งค่าและ Mapping PDO profile EtherCAT ได้ ในการอ่านข้อมูลต่างๆ จาก Drive เพิ่มเติม
แต่ในบทความนี้ยังไม่ลงลึกมาก เราจะใช้ค่า Default ก่อนได้เลย
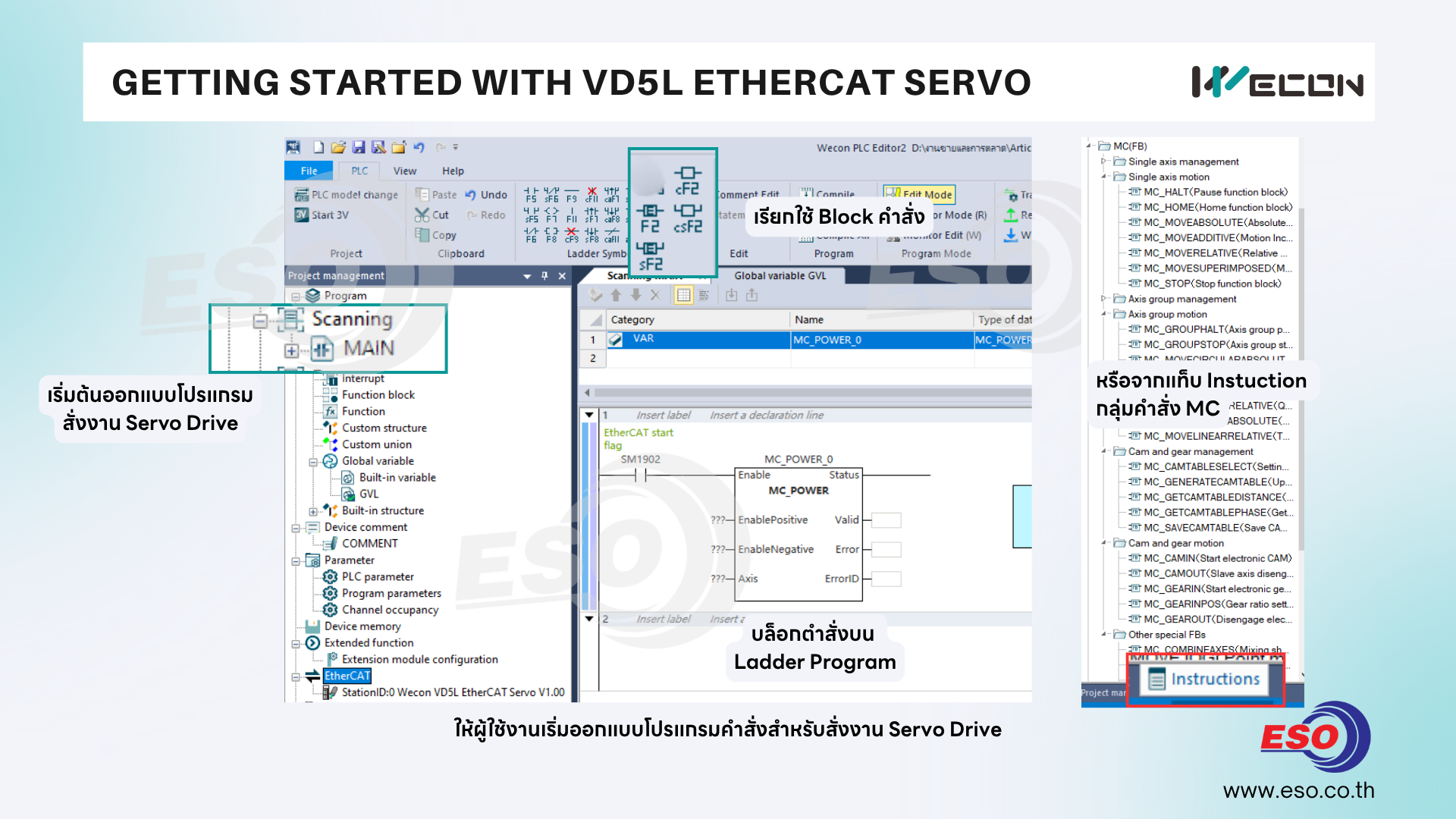
6. ให้ผู้ใช้งานเริ่มออกแบบโปรแกรมคำสั่งสำหรับสั่งงาน Servo Drive โดยไปที่ Scanning > Main โปรแกรมของเรา
โดยเราสามารถเรียกใช้ฟังก์ชั่นบล็อกจากเมนูบาร์ด้านบนแล้วพิมพ์ชื่อ Function Block MC ที่เราต้องการ
หรือจะคลิกที่แท็บ Instruction ด้านซ้ายล่างสุดของจอ แล้วไปที่ชุดคำสั่ง MC(FB) เพื่อเรียกใช้งานบล็อกคำสั่งต่างๆ
แนะนำชุดคำสั่ง Motion Control พื้นฐานสำหรับสั่งงานเซอร์โวไดรฟ์
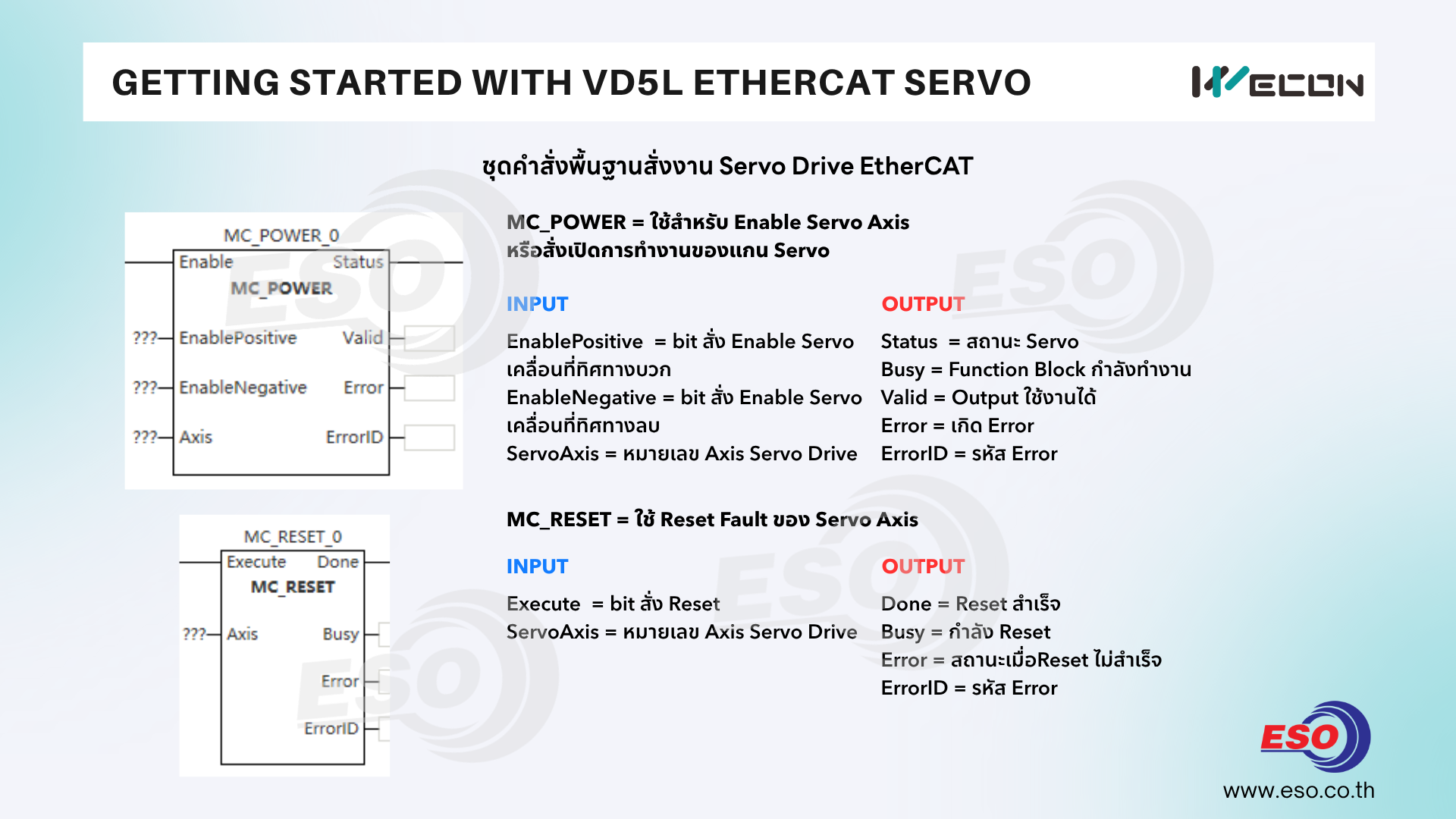
MC_POWER
ใช้สำหรับ Enable Servo Axis หรือสั่งเปิดการทำงานของแกน Servoพื่อทดสอบการเชื่อมต่อ
Input Parameter
EnablePositive = bit สั่ง Enable Servo ให้สามารถเคลื่อนที่ทิศทางบวก
EnableNegative = bit สั่ง Enable Servo ให้สามารถเคลื่อนที่ทิศทางลบ
ServoAxis = หมายเลข Axis Servo Drive
Output Parameter
Status = สถานะ Servo
Busy = Function Block กำลังทำงาน
Valid = Output ใช้งานได้
Error = เกิด Error
ErrorID = รหัส Error
MC_RESET
ใช้ Reset Fault ของ Servo Axis
Input Parameter
Execute = bit สั่ง Reset
ServoAxis = หมายเลข Axis Servo Drive
Output Parameter
Done = Reset สำเร็จ
Busy = กำลัง Reset
Error = สถานะเมื่อReset ไม่สำเร็จ
ErrorID = รหัส Error
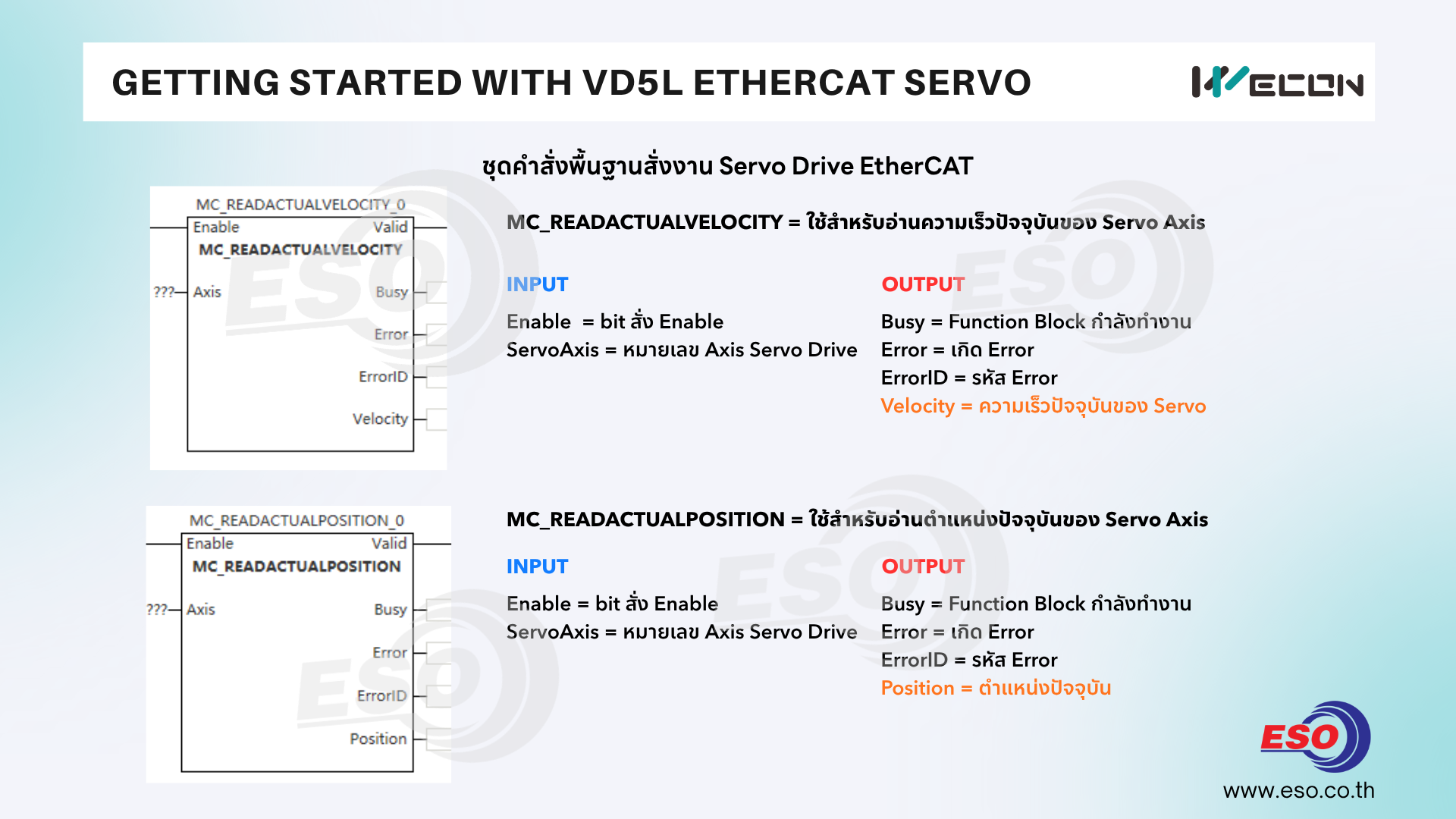
MC_READACTUALVELOCITY
ใช้สำหรับอ่านความเร็วปัจจุบันของ Servo Axis
Input Parameter
Execute = bit สั่ง Reset
ServoAxis = หมายเลข Axis Servo Drive
Output Parameter
Busy = Function Block กำลังทำงาน
Error = เกิด Error
ErrorID = รหัส Error
Velocity = ความเร็วปัจจุบันของ Servo
MC_READACTUALPOSITION
ใช้สำหรับอ่านตำแหน่งปัจจุบันของ Servo Axis
Input Parameter
Enable = bit สั่ง Enable
ServoAxis = หมายเลข Axis Servo Drive
Output Parameter
Busy = Function Block กำลังทำงาน
Error = เกิด Error
ErrorID = รหัส Error
Position = ตำแหน่งปัจจุบัน
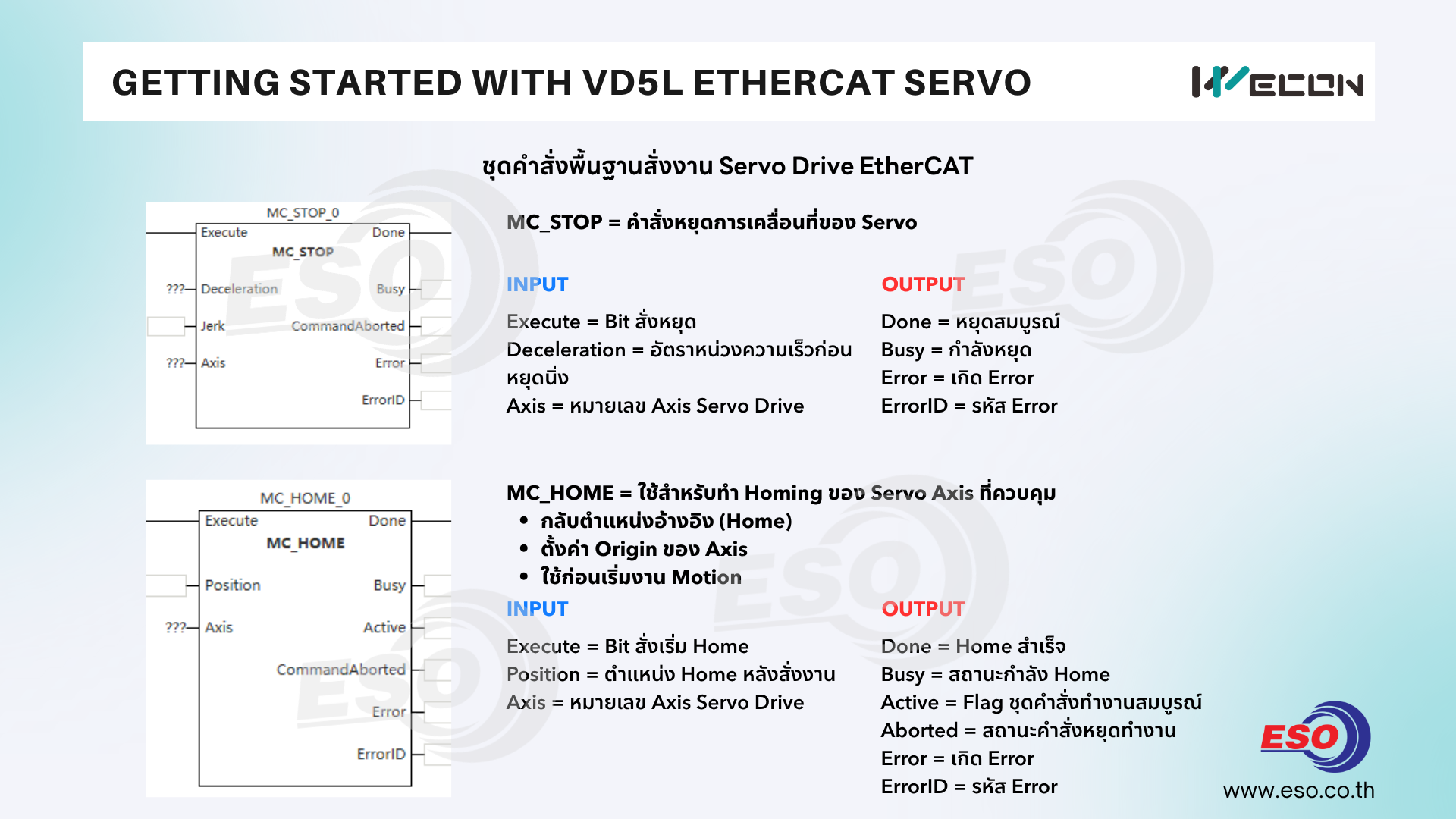
MC_STOP
คำสั่งหยุดการเคลื่อนที่ของ Servo
Input Parameter
Execute = Bit สั่งหยุด
Deceleration = อัตราหน่วงความเร็วก่อนหยุดนิ่ง
Axis = หมายเลข Axis Servo Drive
Output Parameter
Done = หยุดสมบูรณ์
Busy = กำลังหยุด
Error = เกิด Error
ErrorID = รหัส Error
MC_HOME
ใช้สำหรับทำ Homing ของ Servo Axis ที่ควบคุม
- กลับตำแหน่งอ้างอิง (Home)
- ตั้งค่า Origin ของ Axis
- ใช้ก่อนเริ่มงาน Motion
Input Parameter
Execute = Bit สั่งเริ่ม Home
Position = ตำแหน่ง Home หลังสั่งงาน
Axis = หมายเลข Axis Servo Drive
Output Parameter
Done = Home สำเร็จ
Busy = สถานะกำลัง Home
Active = Flag ชุดคำสั่งทำงานสมบูรณ์
CommandAborted = สถานะคำสั่งถูกยกเลิก
Error = เกิด Error
ErrorID = รหัส Error
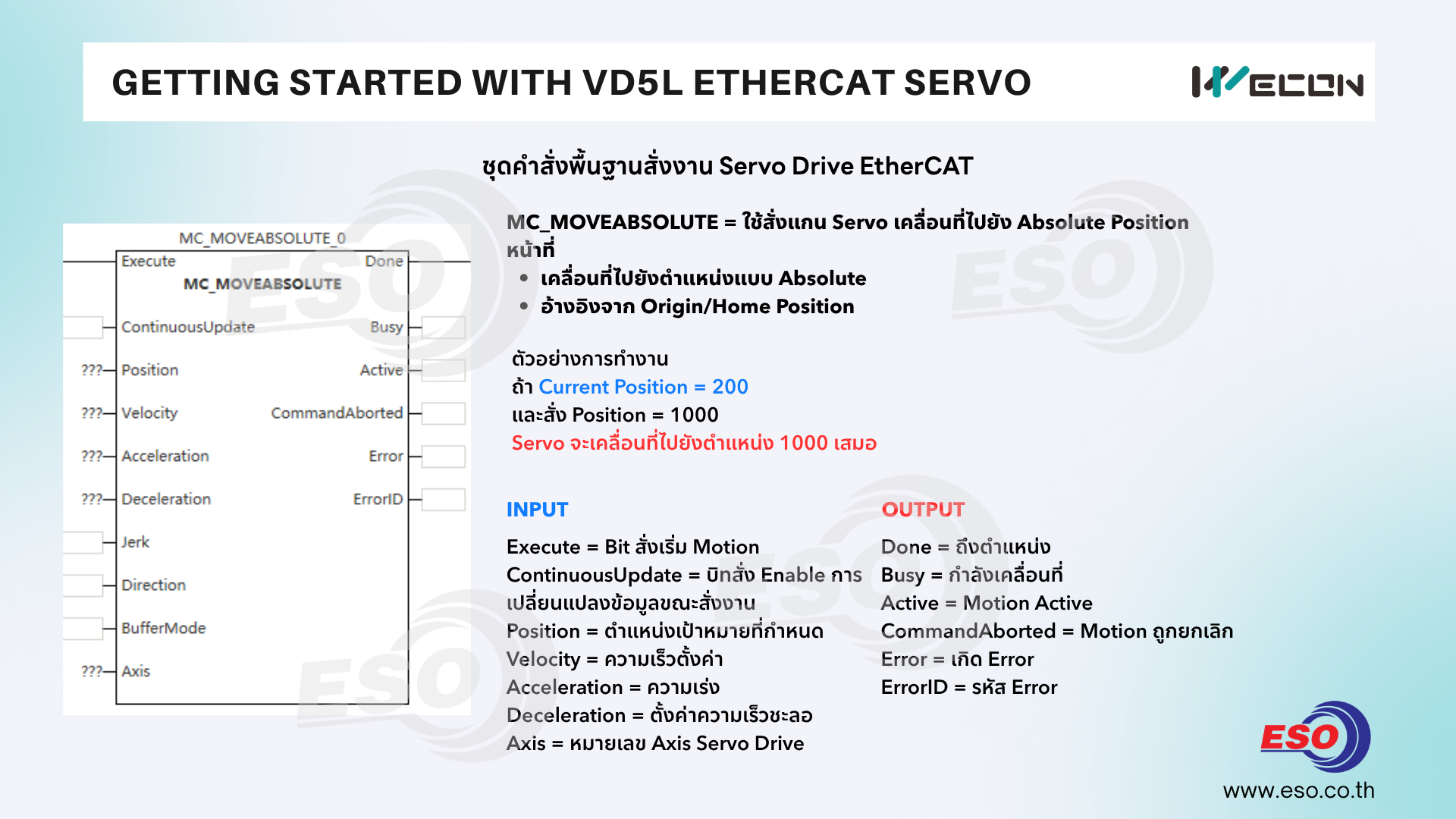
MC_MOVEABSOLUTE
ใช้สั่งแกน Servo เคลื่อนที่ไปยัง Absolute Position
หน้าที่การทำงาน
เคลื่อนที่ไปยังตำแหน่งแบบ Absolute
อ้างอิงจาก Origin/Home Position
ตัวอย่างการทำงาน
ถ้า Current Position = 200
และสั่ง Position = 1000
Servo จะเคลื่อนที่ไปยังตำแหน่ง 1000 เสมอ
Input Parameter
Execute = Bit สั่งเริ่ม Motion
ContinuousUpdate = บิทสั่ง Enable การเปลี่ยนแปลงข้อมูลขณะสั่งงาน
Position = ตำแหน่งเป้าหมายที่กำหนด
Velocity = ความเร็วตั้งค่า
Acceleration = ความเร่งตั้งค่า
Deceleration = ตั้งค่าความเร็วชะลอ
Axis = หมายเลข Axis Servo Drive
Output Parameter
Done = ถึงตำแหน่ง
Busy = กำลังเคลื่อนที่
Active = Motion Active
CommandAborted = Motion ถูกยกเลิก
Error = เกิด Error
ErrorID = รหัส Error
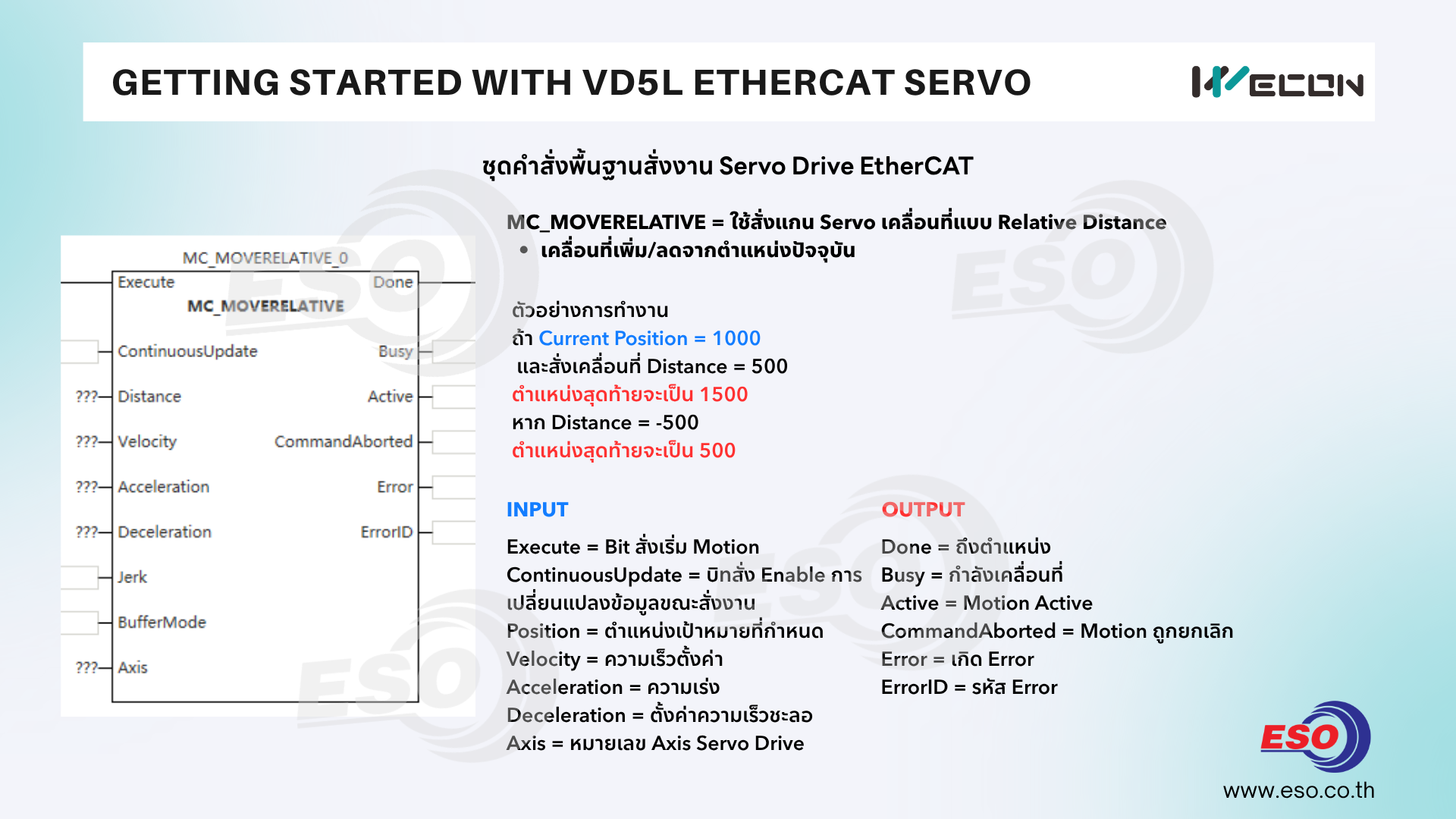
MC_MOVERELATIVE
ใช้สั่งแกน Servo เคลื่อนที่แบบ Relative Distance
เคลื่อนที่เพิ่ม/ลดจากตำแหน่งปัจจุบัน
ตัวอย่างการทำงาน
ถ้า Current Position = 1000
และสั่งเคลื่อนที่ Distance = 500
ตำแหน่งสุดท้ายจะเป็น 1500
หาก Distance = -500
ตำแหน่งสุดท้ายจะเป็น 500
Input Parameter
Execute = Bit สั่งเริ่ม Motion
ContinuousUpdate = บิทสั่ง Enable การเปลี่ยนแปลงข้อมูลขณะสั่งงาน
Position = ตำแหน่งเป้าหมายที่กำหนด
Velocity = ความเร็วตั้งค่า
Acceleration = ความเร่ง
Deceleration = ตั้งค่าความเร็วชะลอ
Axis = หมายเลข Axis Servo Drive
Output Parameter
Done = ถึงตำแหน่ง
Busy = กำลังเคลื่อนที่
Active = Motion Active
CommandAborted = Motion ถูกยกเลิก
Error = เกิด Error
ErrorID = รหัส Error
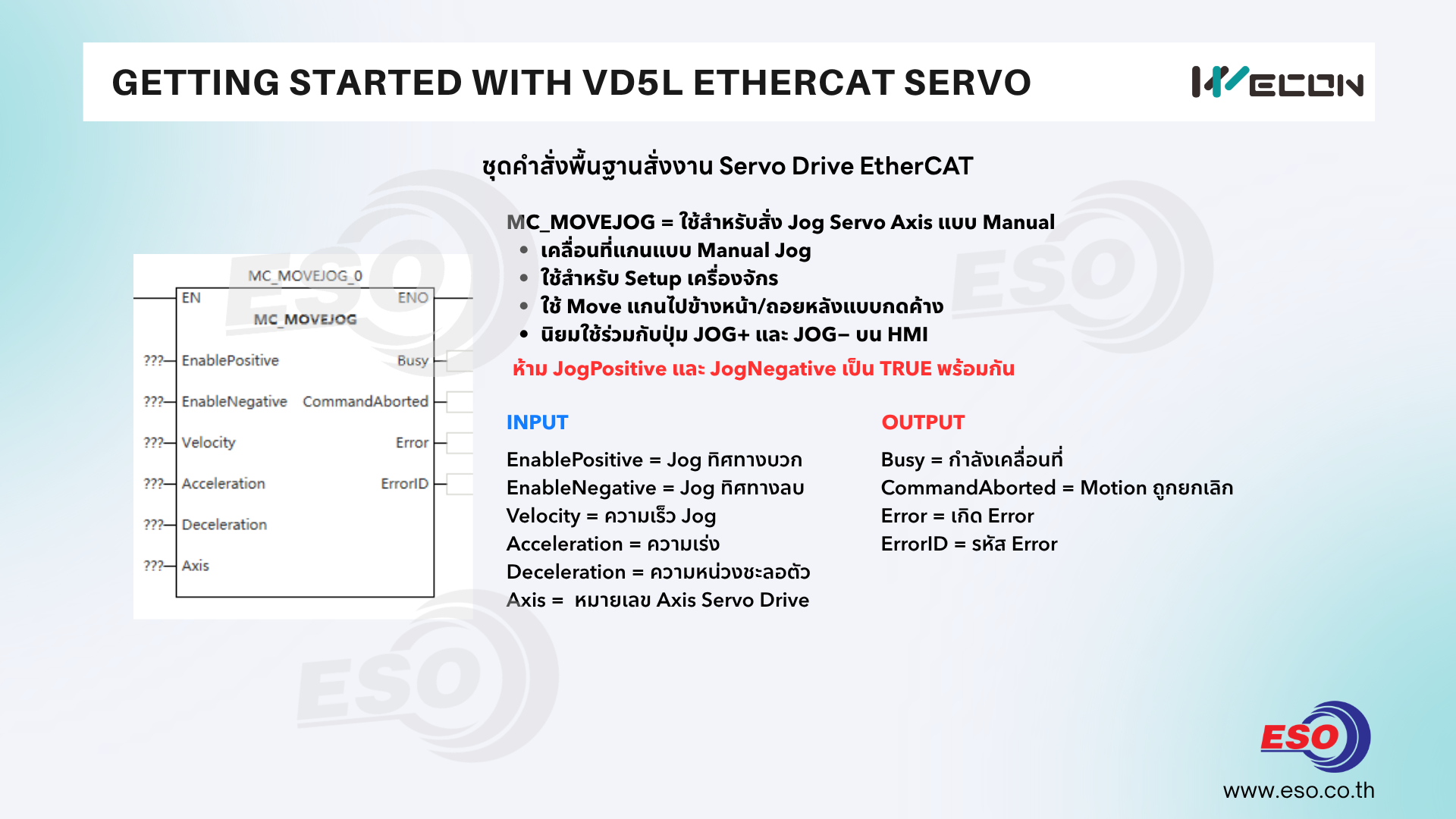
MC_MOVEJOG
ใช้สำหรับสั่ง Jog Servo Axis แบบ Manual
- เคลื่อนที่แกนแบบ Manual Jog
- ใช้สำหรับ Setup เครื่องจักร
- ใช้ Move แกนไปข้างหน้า/ถอยหลังแบบกดค้าง
- นิยมใช้ร่วมกับปุ่ม JOG+ และ JOG− บน HMI
Input Parameter
EnablePositive = Jog ทิศทางบวก
EnableNegative = Jog ทิศทางลบ
Velocity = ความเร็ว Jog
Acceleration = ความเร่ง
Deceleration = ความหน่วงชะลอตัว
Axis = หมายเลข Axis Servo Drive
Output Parameter
Busy = กำลังเคลื่อนที่
CommandAborted = Motion ถูกยกเลิก
Error = เกิด Error
ErrorID = รหัส Error
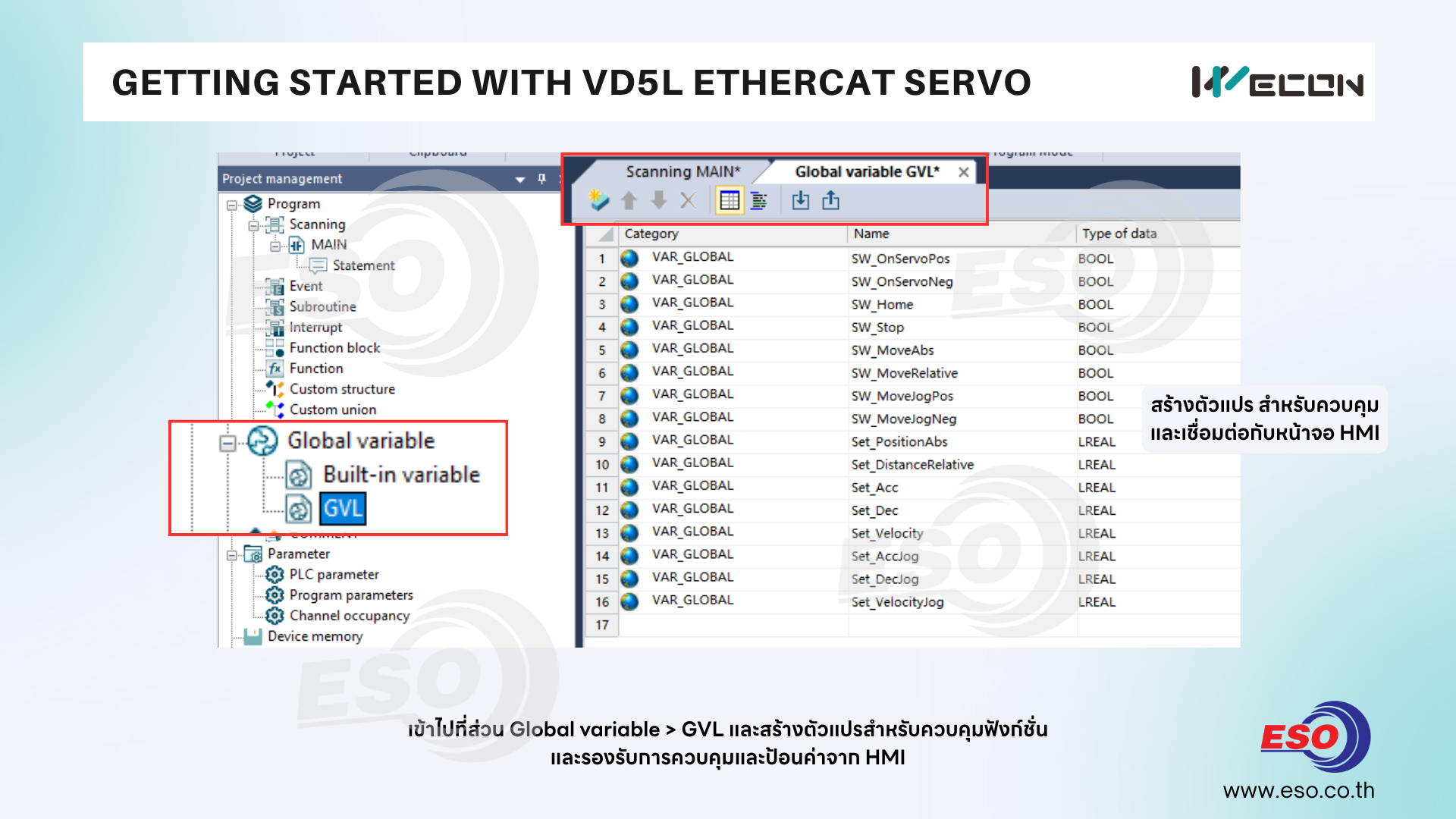
7. เข้าไปที่ส่วน Global variable > GVL และสร้างตัวแปรสำหรับควบคุมฟังก์ชั่น
โดยตัวแปรพื้นฐานที่สามารถเชื่อมต่อกับ HMI ในรูปแบบของ Freetag Protocol นั้นจะมี Global variable นี้
รวมไปถึงบิท Memory พื้นฐานดั้งเดิมของ PLC เช่น X, Y, M, D, S ก็ยังใช้งานได้อยู่เช่นกัน แต่ในบทความนี้จะใช้ Global variable เนื่องจากมีความยืดหยุ่นและอิสระในการใช้งาน
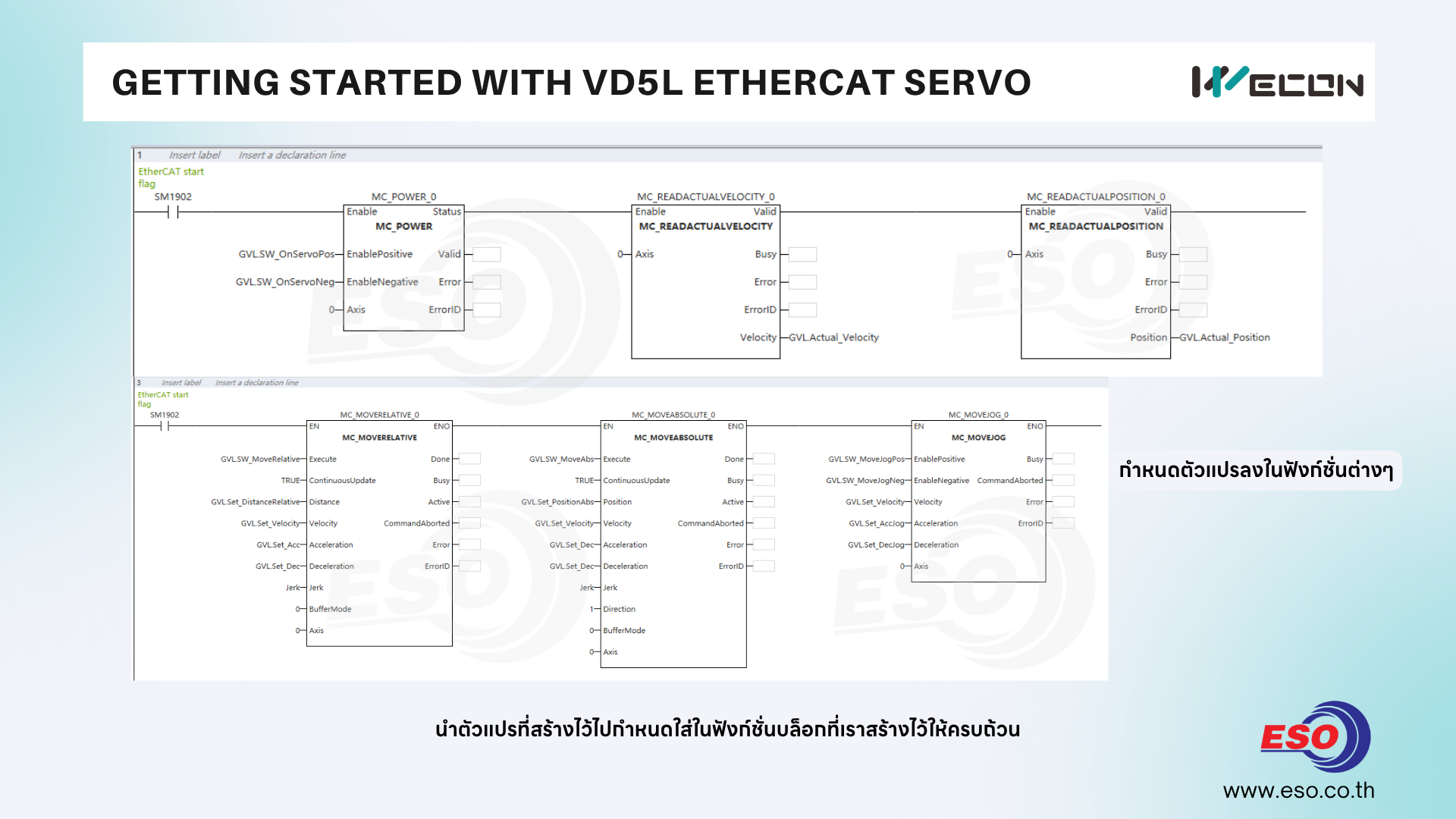
8. นำตัวแปรที่สร้างไว้ไปกำหนดใส่ในฟังก์ชั่นบล็อกที่ใช้สำหรับควบคุม Servo Drive ที่เราสร้างไว้ให้ครบถ้วน
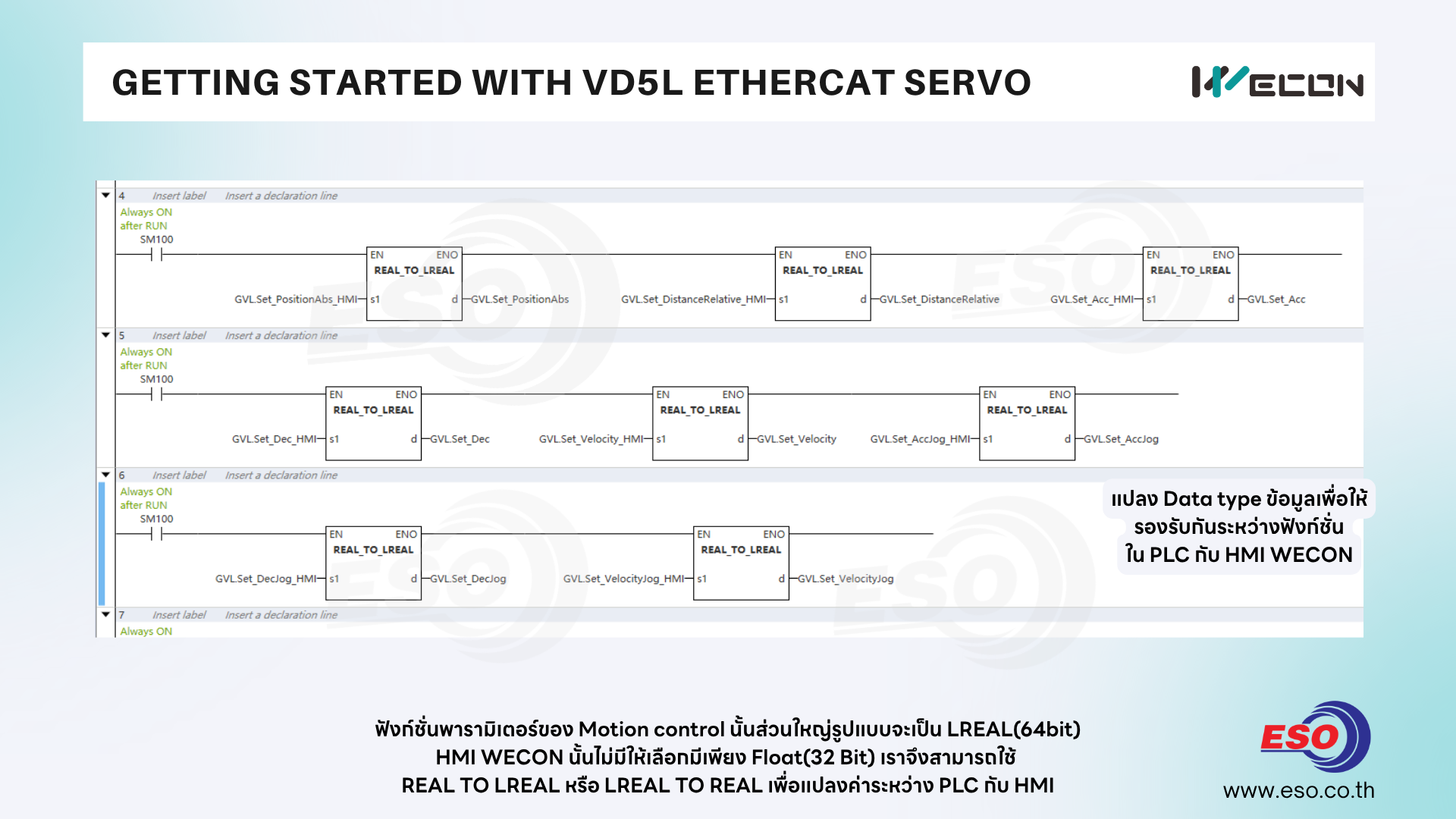
9. ฟังก์ชั่นพารามิเตอร์ของ Motion control นั้นส่วนใหญ่รูปแบบจะเป็น LREAL(64bit)
HMI WECON นั้นไม่มีให้เลือกมีเพียง Float(32 Bit) เราจึงสามารถใช้
REAL TO LREAL หรือ LREAL TO REAL เพื่อแปลงข้อมูลระหว่าง PLC กับ HMI ให้ตรงกับ Data Type ที่ฟังก์ชั่นบล็อกกำหนด
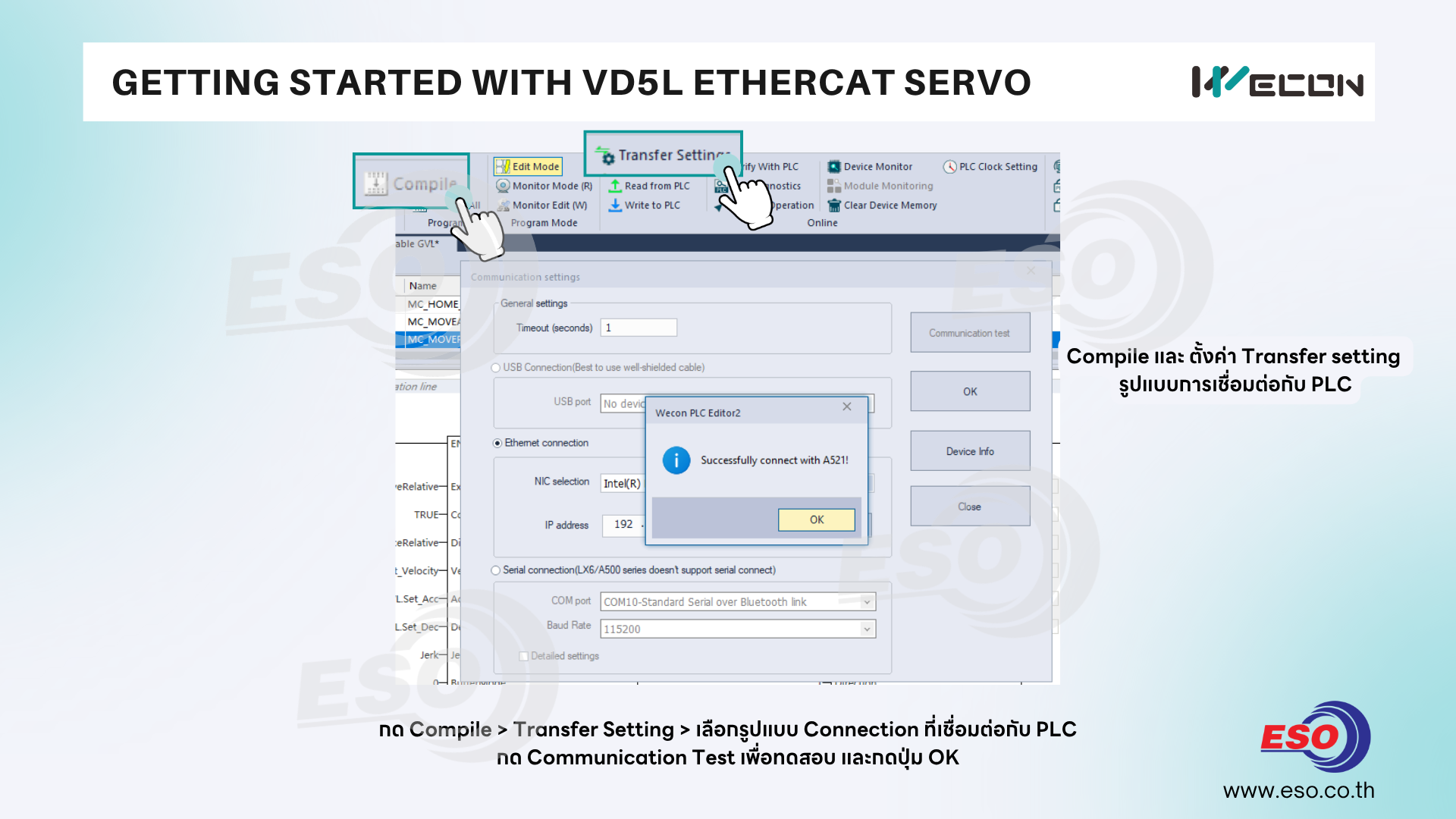
10. หลังจากออกแบบโปรแกรม PLC เรียบร้อยแล้ว ให้กด Compile > Transfer Setting > เลือกรูปแบบ Connection ที่เชื่อมต่อกับ PLC
กด Communication Test เพื่อทดสอบการเชื่อมต่อ และกดปุ่ม OK
โดยหากเป็นการต่อใช้งาน PLC ครั้งแรกจะแนะนำให้ใช้สาย USB Type C ต่อเข้ากับ PLC A500 ก็จะสะดวก เพื่อกำหนด IP Address ครั้งแรก หลังจากนั้นสามารถเลือกโหลดโปรแกรมผ่าน Ethernet Port ได้
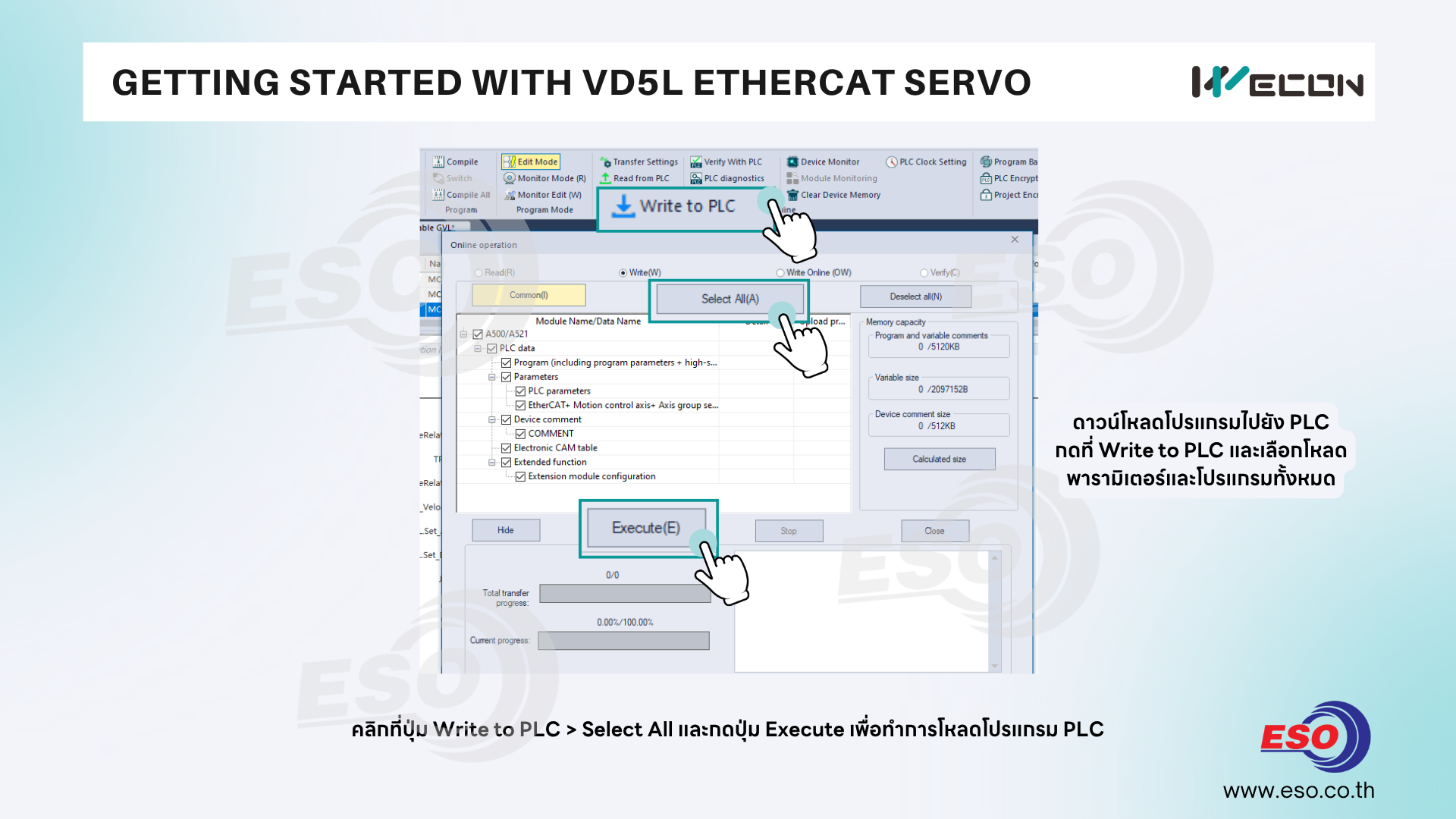
11. คลิกที่ปุ่ม Write to PLC > Select All และกดปุ่ม Execute เพื่อทำการโหลดโปรแกรม PLC
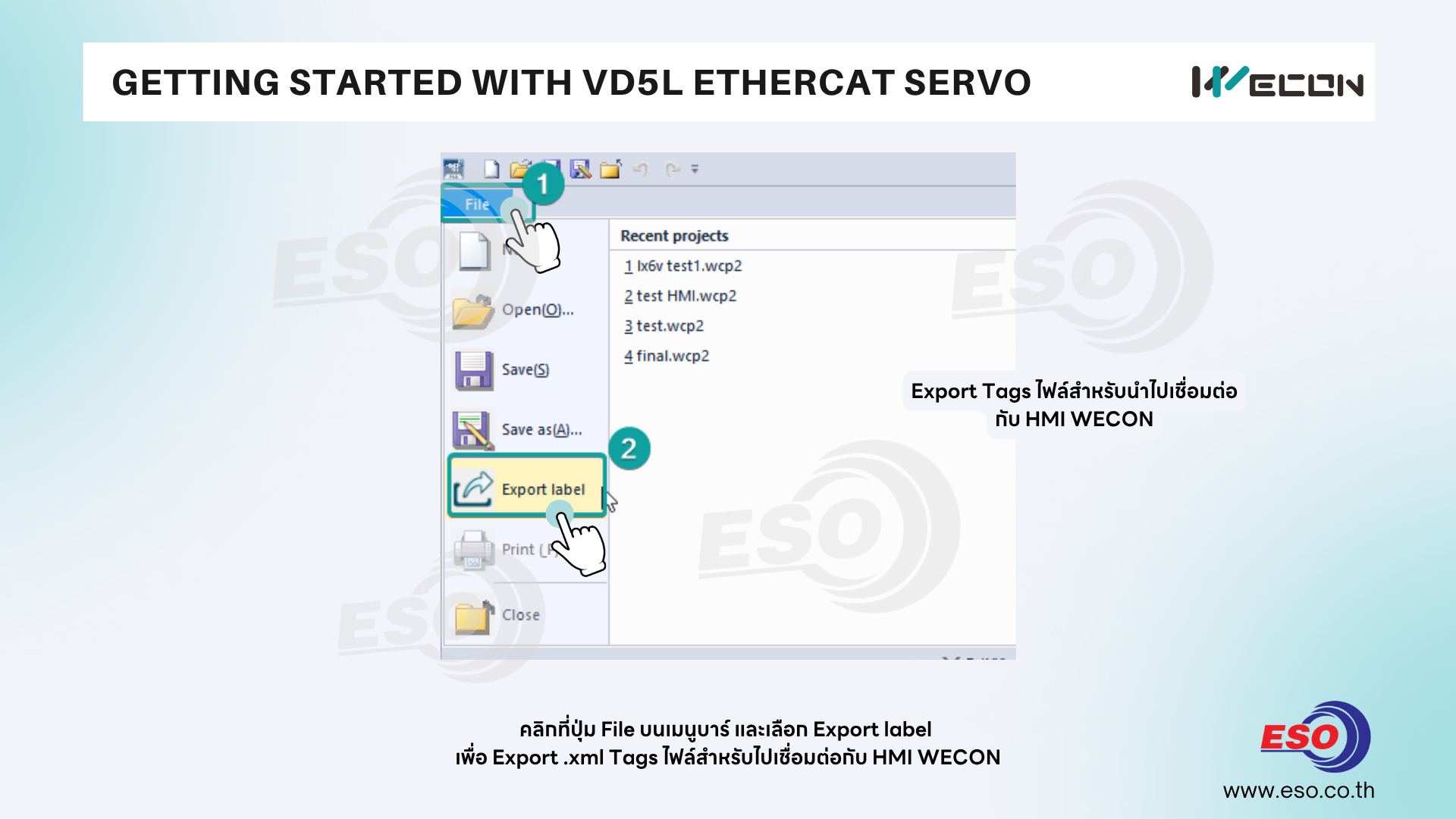
12. คลิกที่ปุ่ม File บนเมนูบาร์ และเลือก Export label
เพื่อ Export .xml Tags ไฟล์สำหรับไปเชื่อมต่อกับ HMI WECON
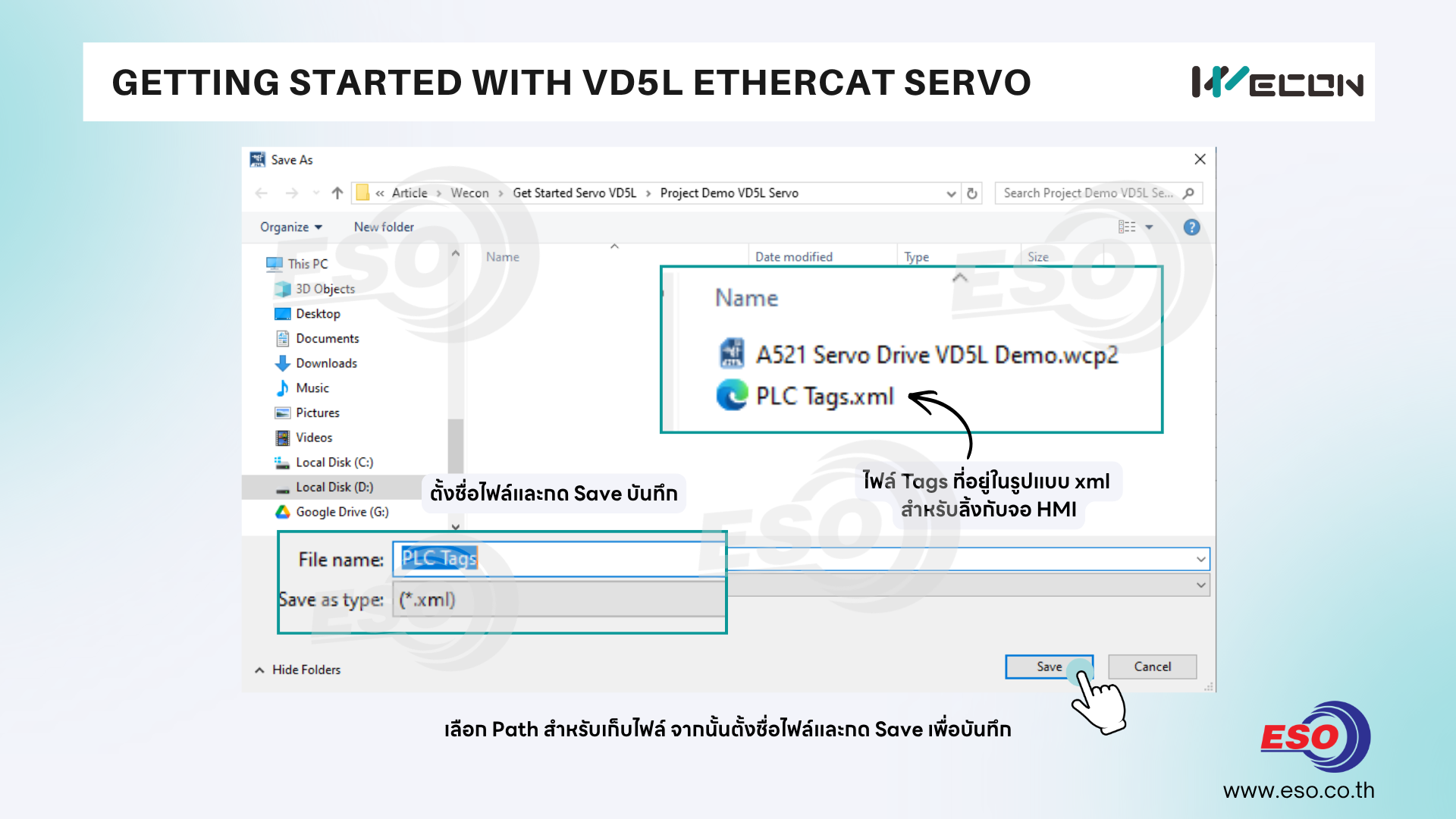
13. เลือก Path สำหรับเก็บไฟล์ จากนั้นตั้งชื่อไฟล์และกด Save เพื่อบันทึก
เราจะได้ไฟล์สกุล .xml สำหรับไว้ Import ในโปรเจค HMI
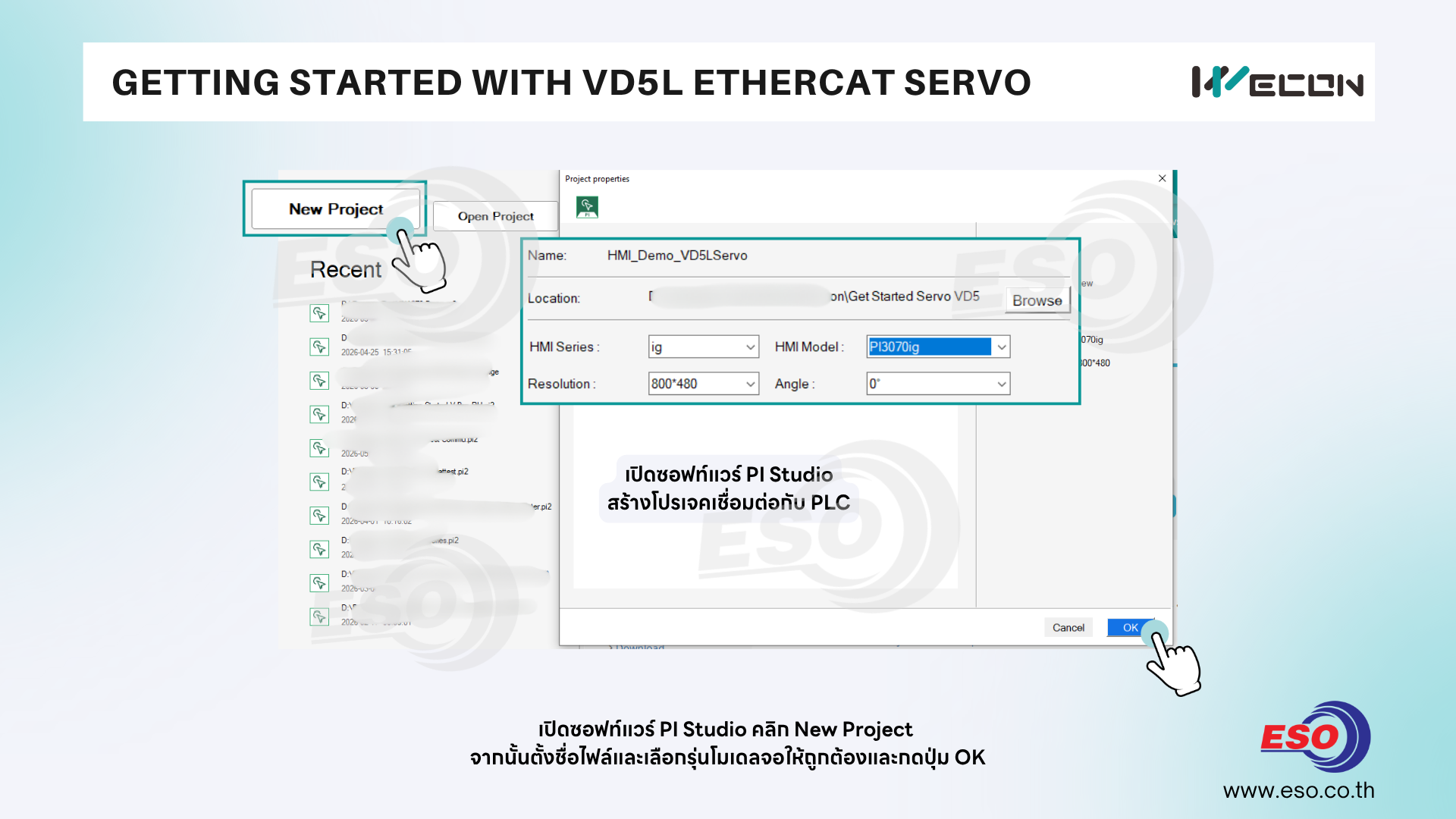
14. เปิดซอฟท์แวร์ PI Studio คลิก New Project เพื่อสร้างโปรเจคออกแบบจอ HMI
จากนั้นตั้งชื่อไฟล์และเลือกรุ่นโมเดลจอให้ถูกต้องและกดปุ่ม OK
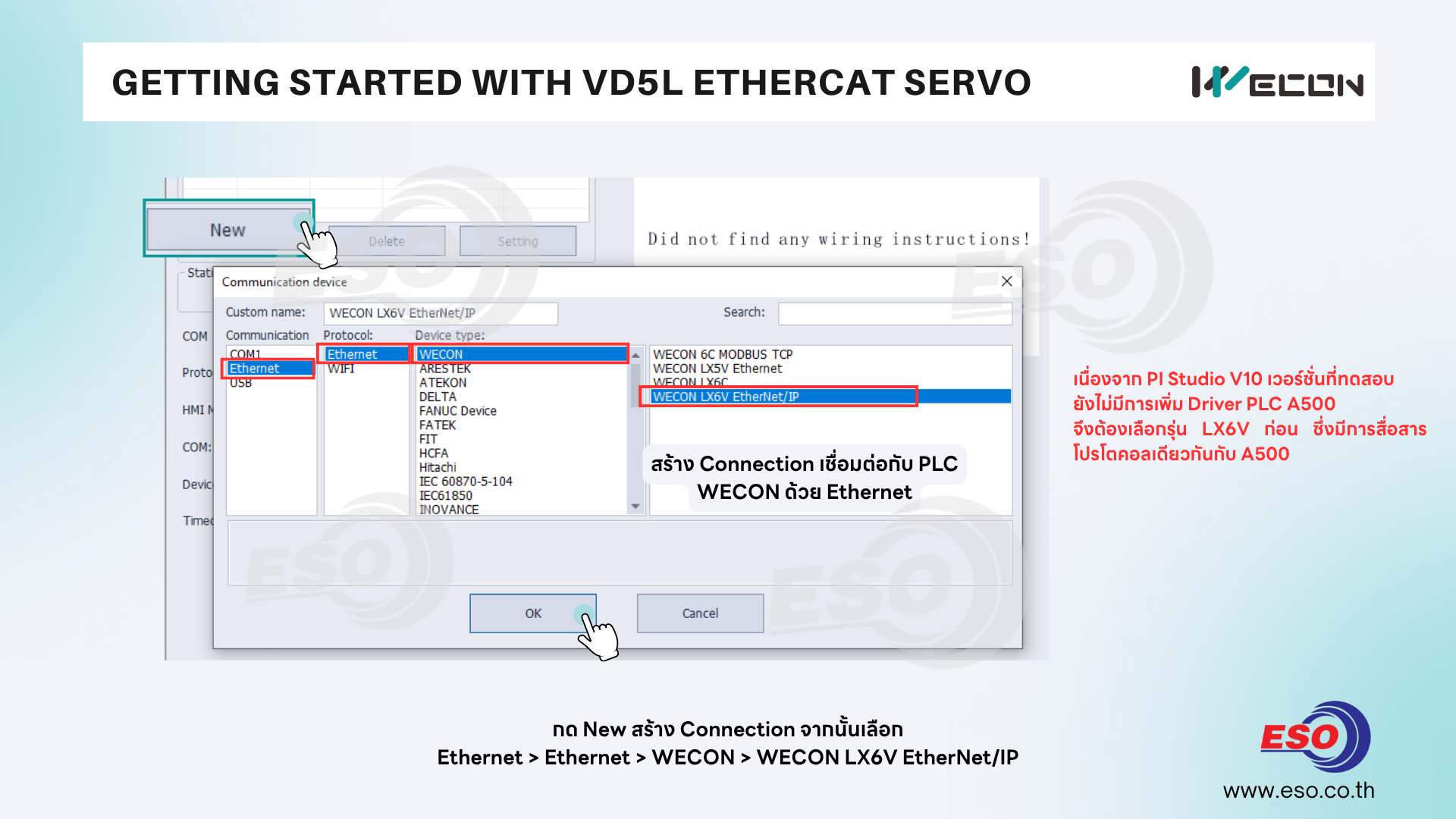
15. กด New สร้าง Connection จากนั้นเลือก
Ethernet > Ethernet > WECON > WECON LX6V EtherNet/IP
เนื่องจาก PI Studio V10 เวอร์ชั่นที่ทดสอบ ยังไม่มีการเพิ่ม Driver PLC A500
จึงต้องเลือกรุ่น LX6V ก่อน ซึ่งมีการสื่อสารโปรโตคอลเดียวกันกับ A500
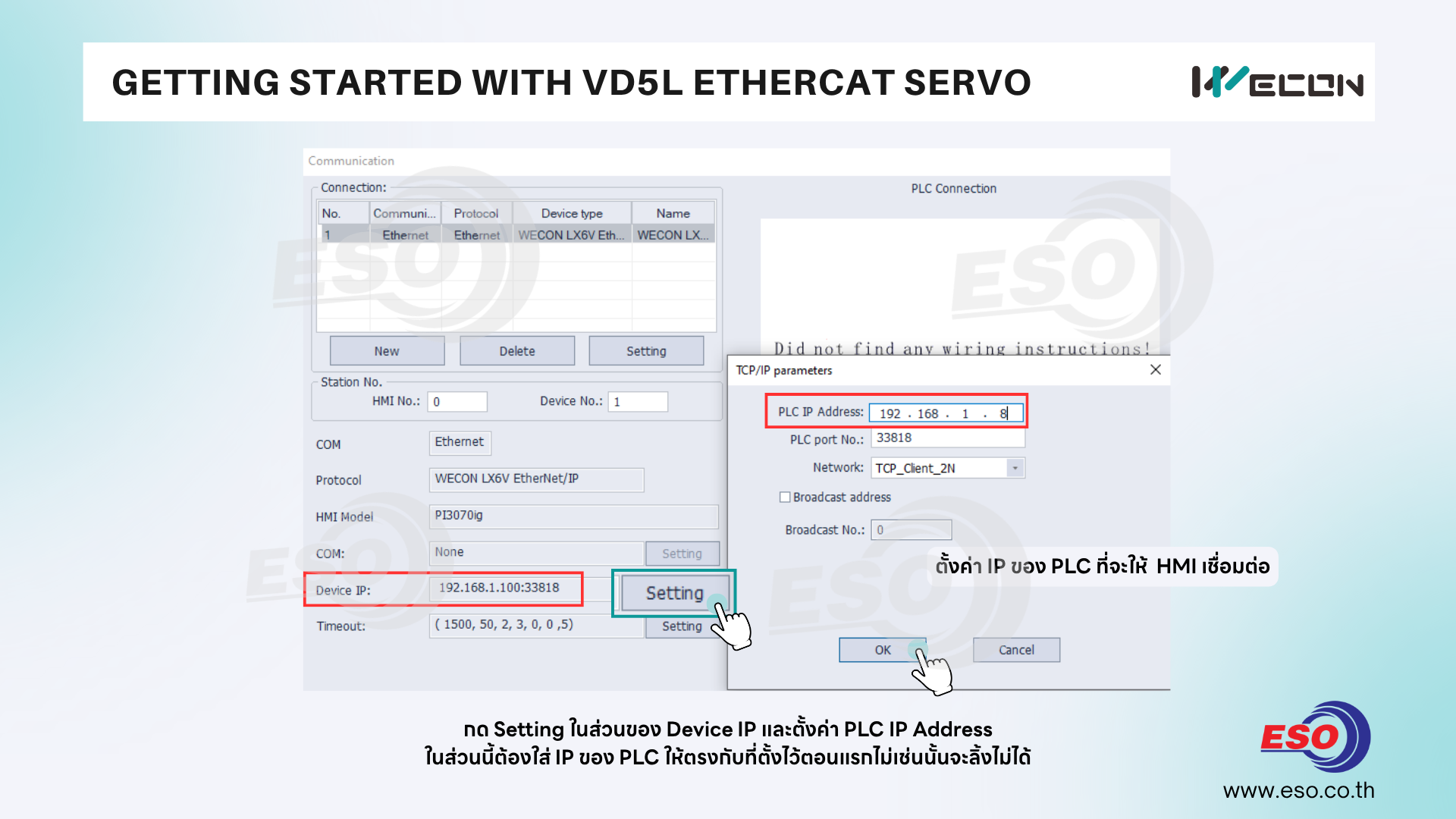
16. กด Setting ในส่วนของ Device IP และตั้งค่า PLC IP Address ที่ต้องการให้ HMI ไปลิ้งข้อมูล
ในส่วนนี้ต้องใส่ IP ของ PLC ให้ตรงกับที่ตั้งไว้ในขั้นตอนที่ 3 ไม่เช่นนั้นจะลิ้งไม่ได้
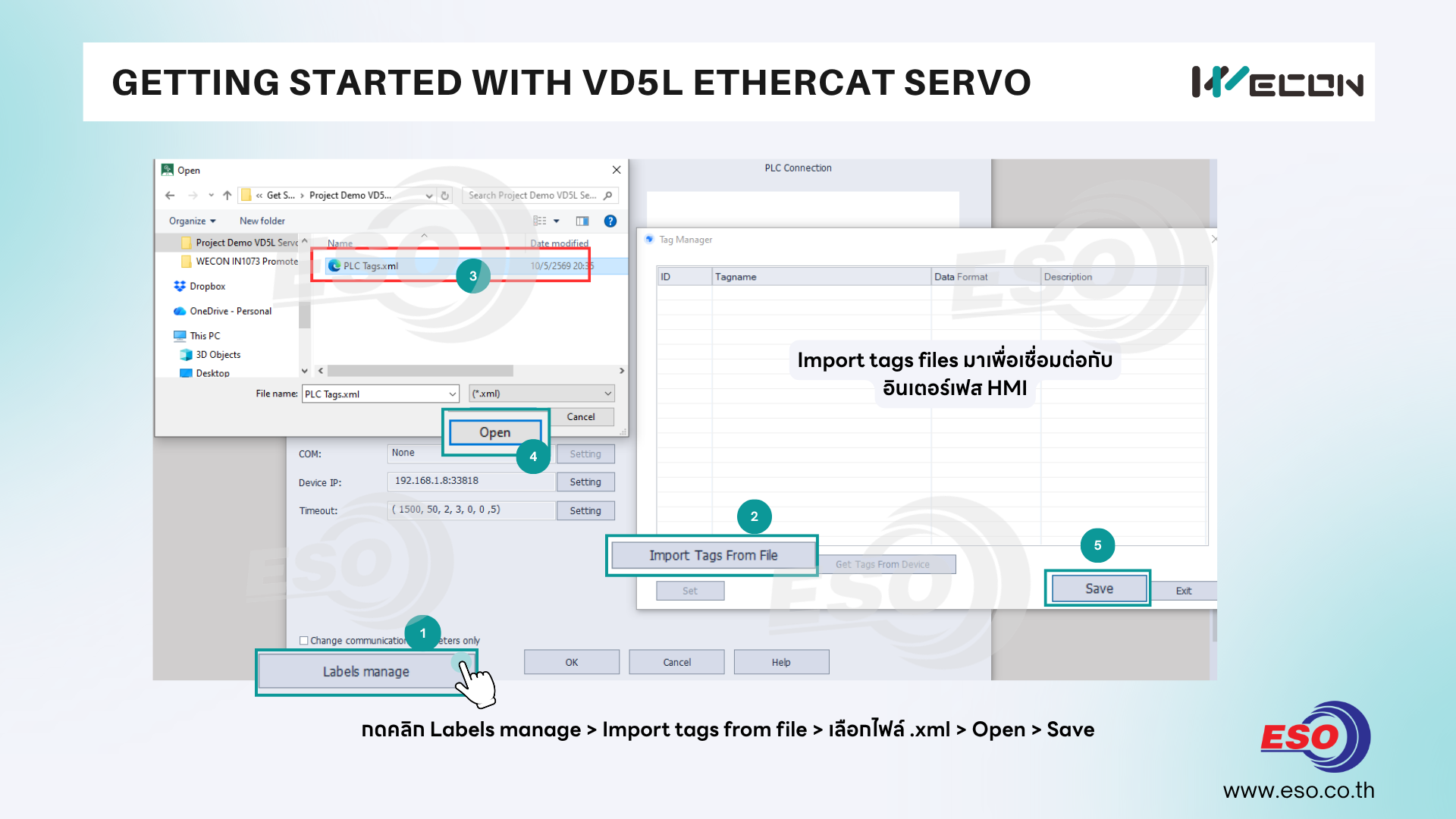
17. กดคลิก Labels manage > Import tags from file > เลือกไฟล์ .xml > Open > Save
Tag ที่ถูก Export จาก PLC ก็จะถูกนำเข้ามาให้ผู้ใช้งานได้เลือกนำไปใช้ในการกำหนดข้อมูลสั่งงานใน Object ต่างๆ
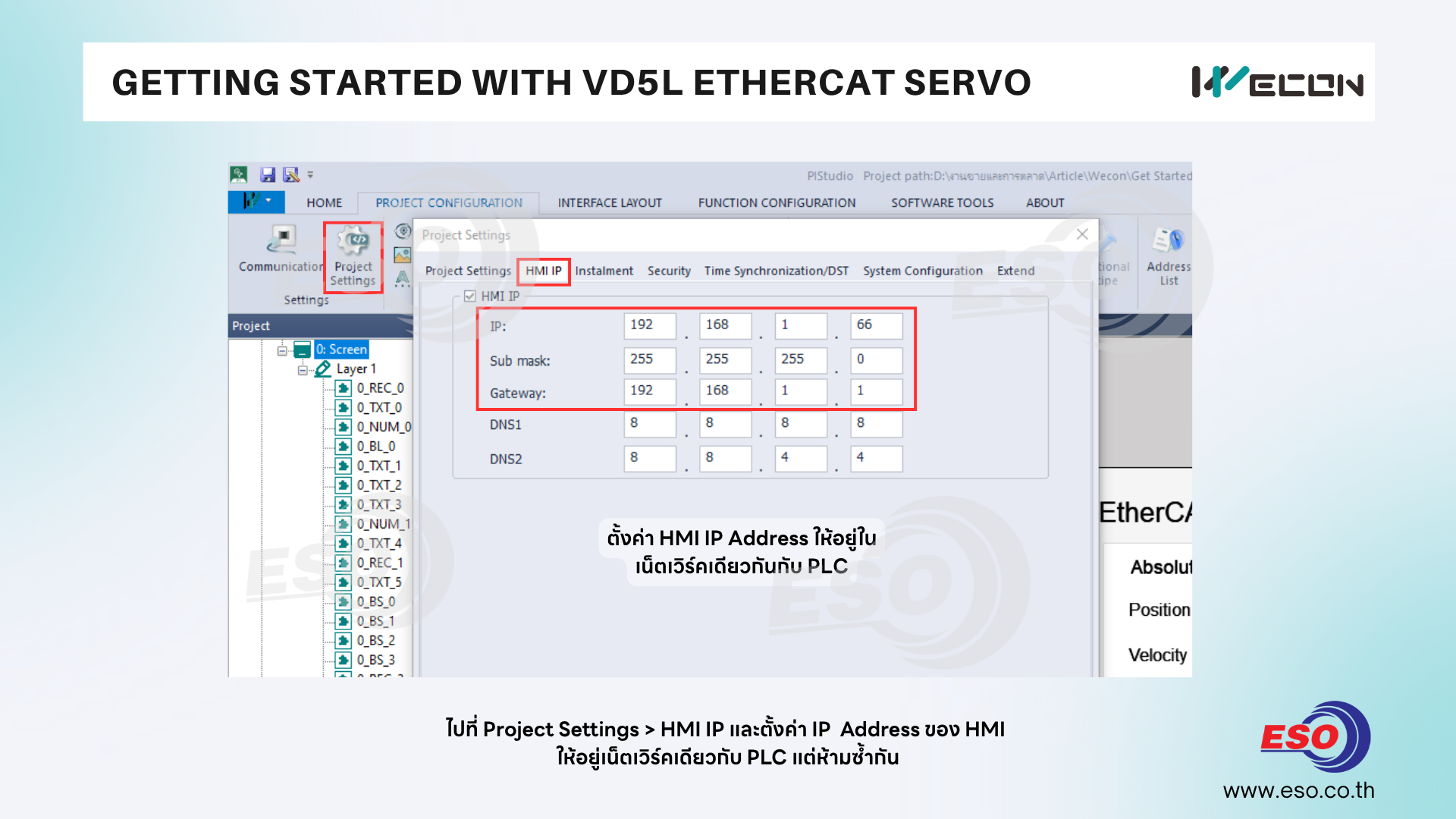
18. ไปที่ Project Settings > HMI IP และตั้งค่า IP Address ของ HMI ให้อยู่เน็ตเวิร์คเดียวกับ PLC แต่ห้ามซ้ำกัน
ซึ่ง PLC = 192.168.1.8 ในที่นี้ตั้ง HMI = 192.168.1.66
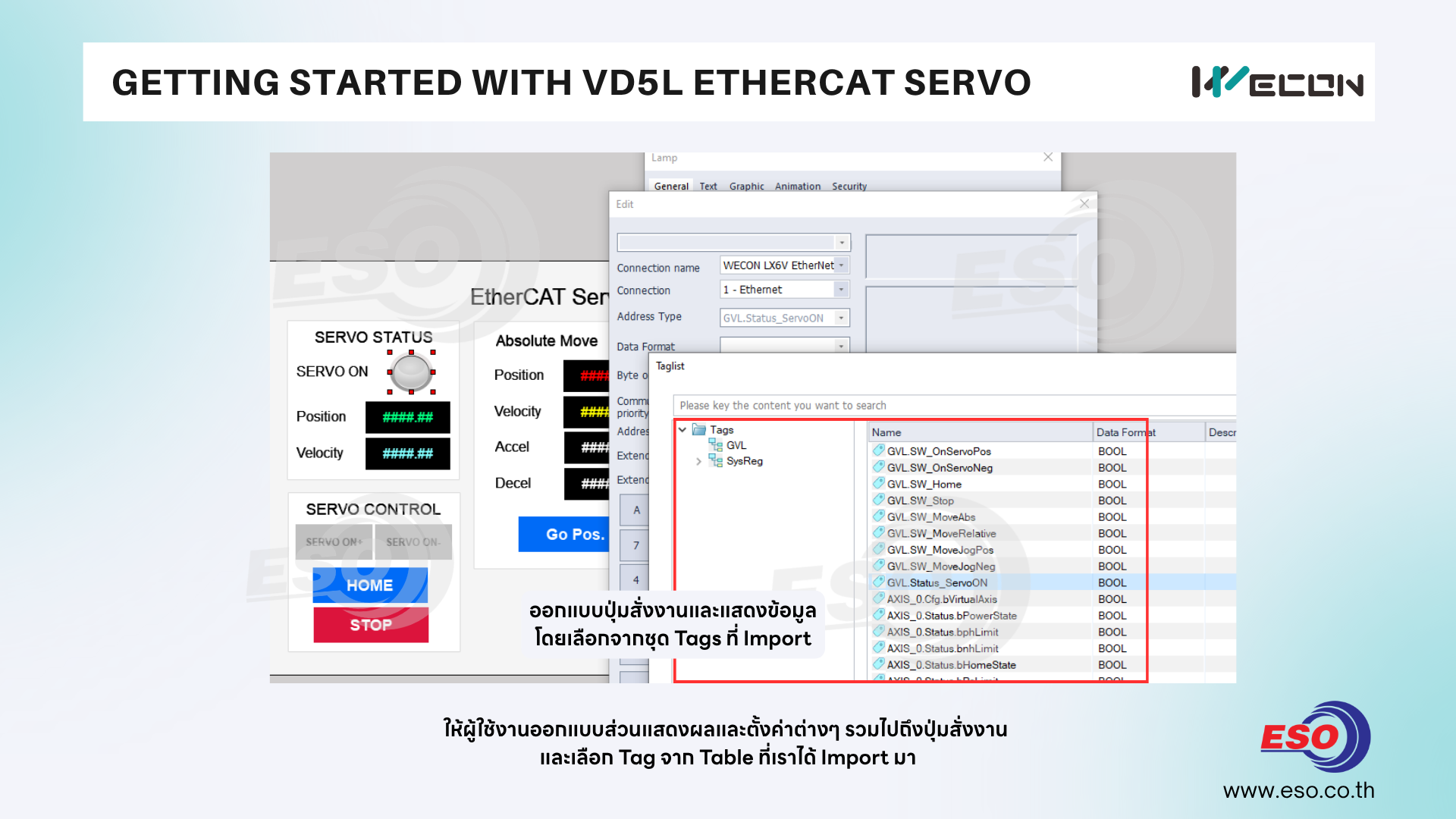
19. ให้ผู้ใช้งานออกแบบส่วนแสดงผลและตั้งค่าต่างๆ รวมไปถึงปุ่มสั่งงาน และเลือก Tag จาก Table ที่เราได้ Import มา
ท่านสามารถดาวน์โหลดตัวอย่างโปรเจคทั้ง PLC และ HMI ได้จากท้ายบทความ
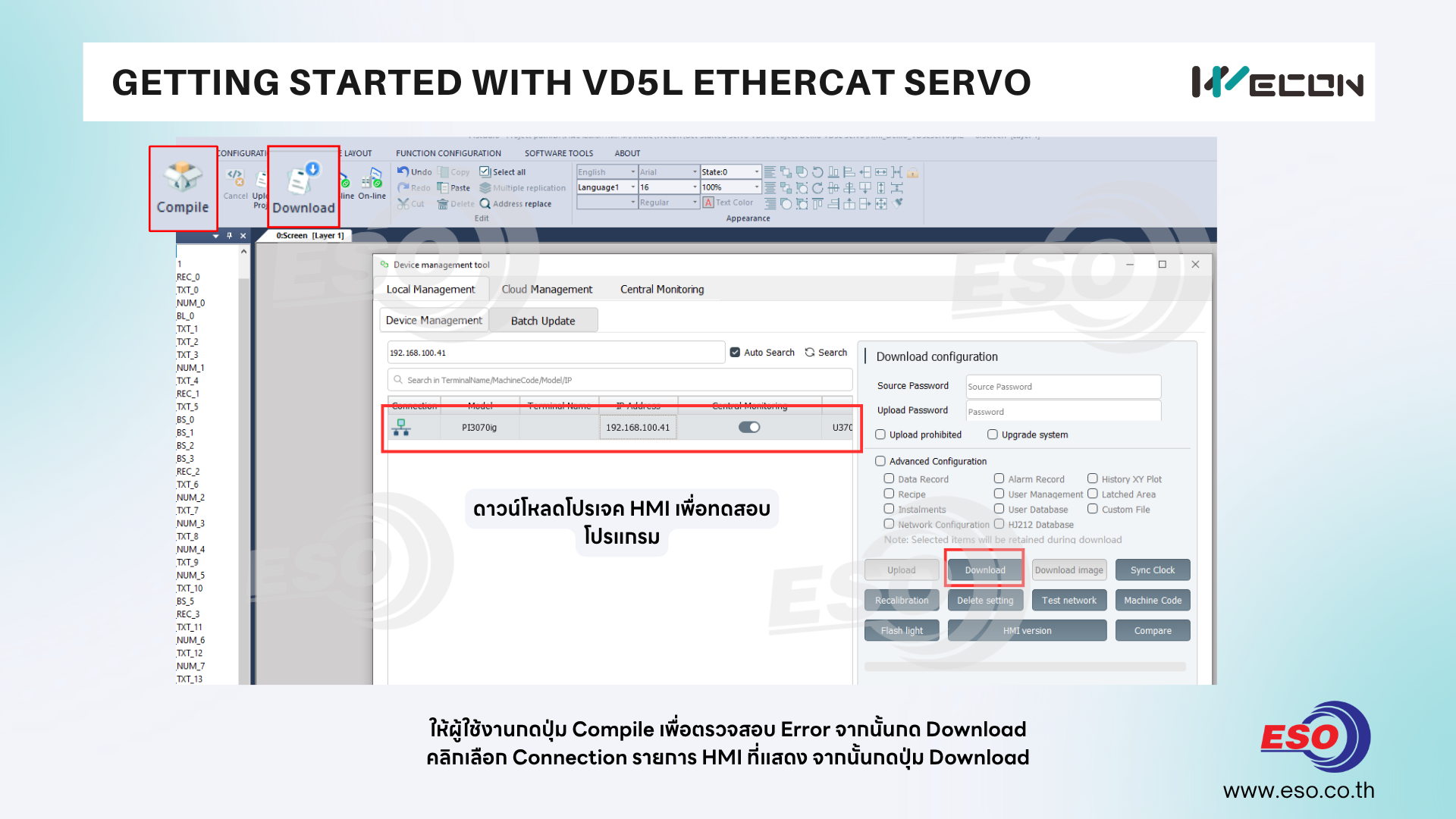
20. ให้ผู้ใช้งานกดปุ่ม Compile เพื่อตรวจสอบ Error จากนั้นกด Download
คลิกเลือก Connection รายการ HMI ที่แสดง จากนั้นกดปุ่ม Download เพื่อเริ่มทำการดาวน์โหลด
ผู้ใช้งานสามารถโหลดโปรแกรม HMI ผ่านสาย USB หรือ Ethernet Port หากเป็นกรณี Ethernet Port จะต้องตั้ง IP Address ของคอมพิวเตอร์กับ HMI ให้อยู่ในเน็ตเวิร์คเดียวกันด้วย
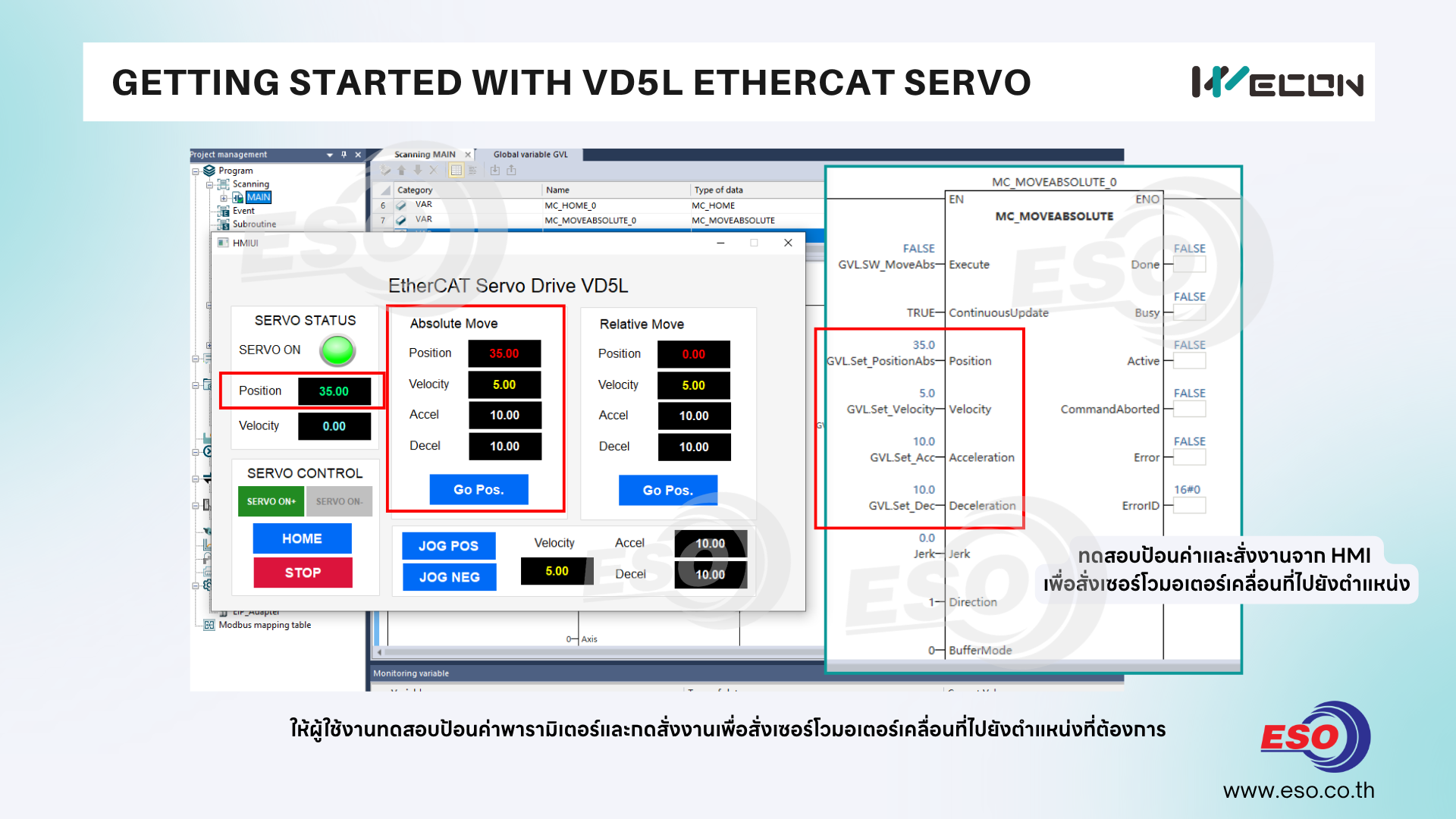
21. ให้ผู้ใช้งานทดสอบป้อนค่าพารามิเตอร์และกดสั่งงานเพื่อสั่งเซอร์โวมอเตอร์เคลื่อนที่ไปยังตำแหน่งที่ต้องการ
จากตัวอย่างจะเห็นว่าการทดสอบเขียนโปรแกรมสั่งงานควบคุม EtherCAT Servo Drive นั้น มีความง่ายมากๆ มีความซับซ้อนน้อยกว่าการควบคุมแบบ Pulse ปกติ
อีกทั้งช่วยให้การ commissioning และทดสอบระบบมีความรวดเร็ว ตรวจสอบ Error และแก้ไขได้ง่าย
ใช้เพียงสาย LAN เพียงเส้นเดียว!!!! ไม่ต้องนั่งบัดกรีให้วุ่นวาย
ท่านสามารถดาวน์โหลดตัวอย่างโปรเจค PLC และ HMI WECON สำหรับควบคุมสั่งงาน EtherCAT Servo Drive ได้ที่นี่
Demo Project EtherCAT Servo VD5L WECON
กดติดตามบทความแนะนำการใช้งานอุปกรณ์ WECON ได้ทางเว็บไซต์ของเรานะครับ
เนื้อหาและรูปภาพในบทความนี้เป็นลิขสิทธิ์ของทางบริษัท อีเอสโอ เทค จำกัด ไม่อนุญาตให้ทำการแก้ไขดัดแปลงทำซ้ำเพื่อประโยชน์ทางการค้าโดยไม่ได้รับการอนุญาต
สนใจสอบถามข้อมูลเพิ่มเติมและติดต่อเราได้ที่
บริษัท อีเอสโอ เทค จำกัด ตัวแทนจำหน่ายสินค้าแบรนด์ WECON
https://www.eso.co.th/
info@eso.co.th
097-253-2728 , 096-854-9256
Line official : @eso.co.th
Instagram : https://www.instagram.com/eso.co.th/
Facebook : https://www.facebook.com/eso.co.th


































